A single equation connects geometry, algebra, and many real-world applications: \(\sin^2(\theta) + \cos^2(\theta) = 1\). That statement may look simple, but it is one of the most powerful identities in trigonometry. It lets you find missing trigonometric values, test whether answers make sense, and move easily between different ways of describing an angle.
When you know one trigonometric function of an angle, you often want the others. For example, if you know \(\sin(\theta)\), can you find \(\cos(\theta)\)? If you know \(\tan(\theta)\), can you determine sine and cosine? The answer is yes, but only if you use identities carefully and pay attention to the quadrant of the angle.
The equation \(\sin^2(\theta) + \cos^2(\theta) = 1\) is called a Pythagorean identity because it comes directly from the Pythagorean theorem. An identity is an equation that is true for every value in its domain, not just for one special case.
From right-triangle trigonometry, \(\sin(\theta) = \dfrac{\textrm{opposite}}{\textrm{hypotenuse}}\), \(\cos(\theta) = \dfrac{\textrm{adjacent}}{\textrm{hypotenuse}}\), and \(\tan(\theta) = \dfrac{\textrm{opposite}}{\textrm{adjacent}}\). From geometry, the Pythagorean theorem says \(a^2 + b^2 = c^2\) for a right triangle.
Those ideas are enough to prove the identity. After that, the rest is algebra and sign reasoning.
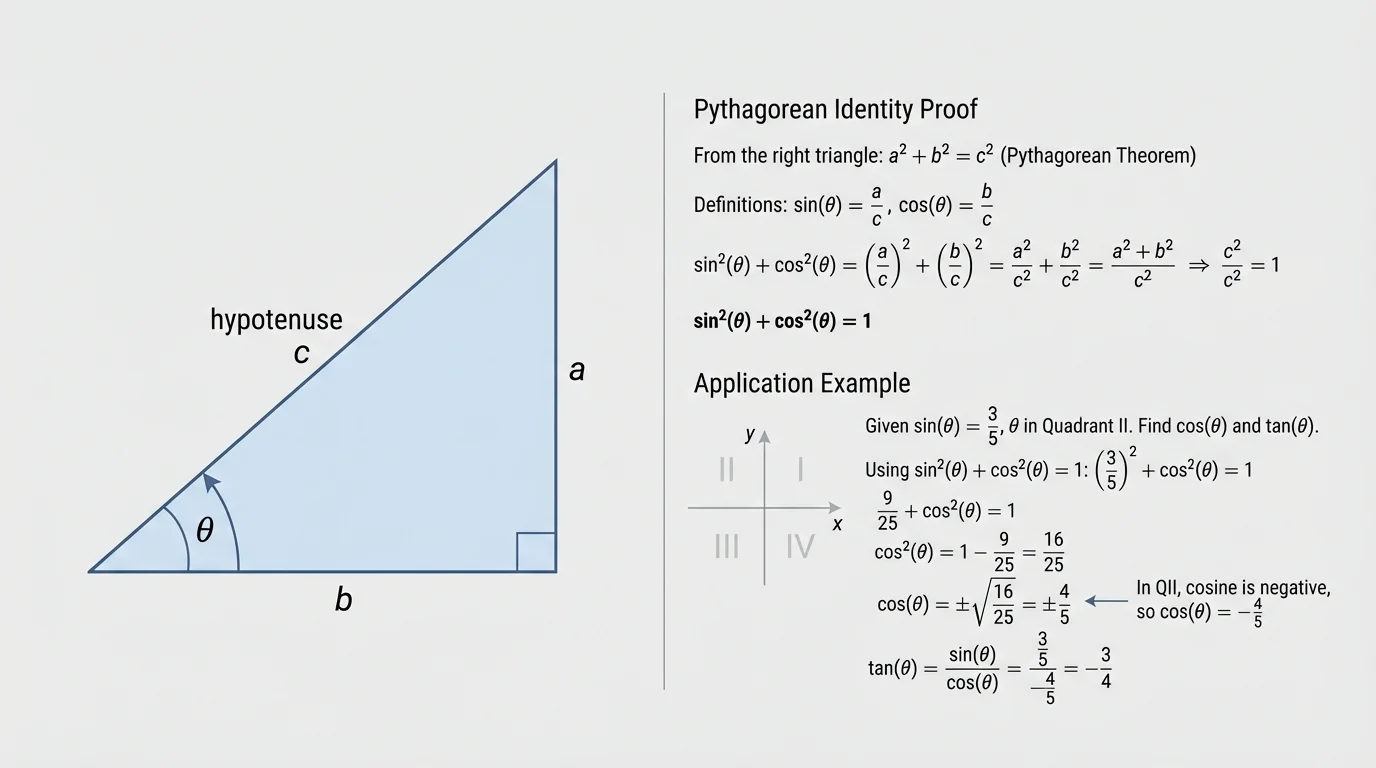
[Figure 1] Suppose \(\theta\) is an acute angle in a right triangle. Let the side opposite \(\theta\) be \(a\), the side adjacent to \(\theta\) be \(b\), and the hypotenuse be \(c\). The relationships among these sides lead directly to the identity.
By definition, \(\sin(\theta) = \dfrac{a}{c}\) and \(\cos(\theta) = \dfrac{b}{c}\). If we square both expressions, we get \(\sin^2(\theta) = \dfrac{a^2}{c^2}\) and \(\cos^2(\theta) = \dfrac{b^2}{c^2}\).
Now add them:
\[\sin^2(\theta) + \cos^2(\theta) = \frac{a^2}{c^2} + \frac{b^2}{c^2} = \frac{a^2 + b^2}{c^2}\]
By the Pythagorean theorem, \(a^2 + b^2 = c^2\). Substitute that into the numerator:
\[\sin^2(\theta) + \cos^2(\theta) = \frac{c^2}{c^2} = 1\]
So we have proved
\[\sin^2(\theta) + \cos^2(\theta) = 1\]
This proof is elegant because it turns a geometry fact about side lengths into a trigonometric fact about functions. Later, whenever you know one of \(\sin(\theta)\) or \(\cos(\theta)\), you can use this identity to find the other.
The Pythagorean identity is a trigonometric identity that comes from the Pythagorean theorem. The most fundamental one is \(\sin^2(\theta) + \cos^2(\theta) = 1\).
Quadrant is one of the four regions of the coordinate plane formed by the \(x\)-axis and \(y\)-axis.
There is another important reason this identity matters: it is not limited to acute angles in right triangles.
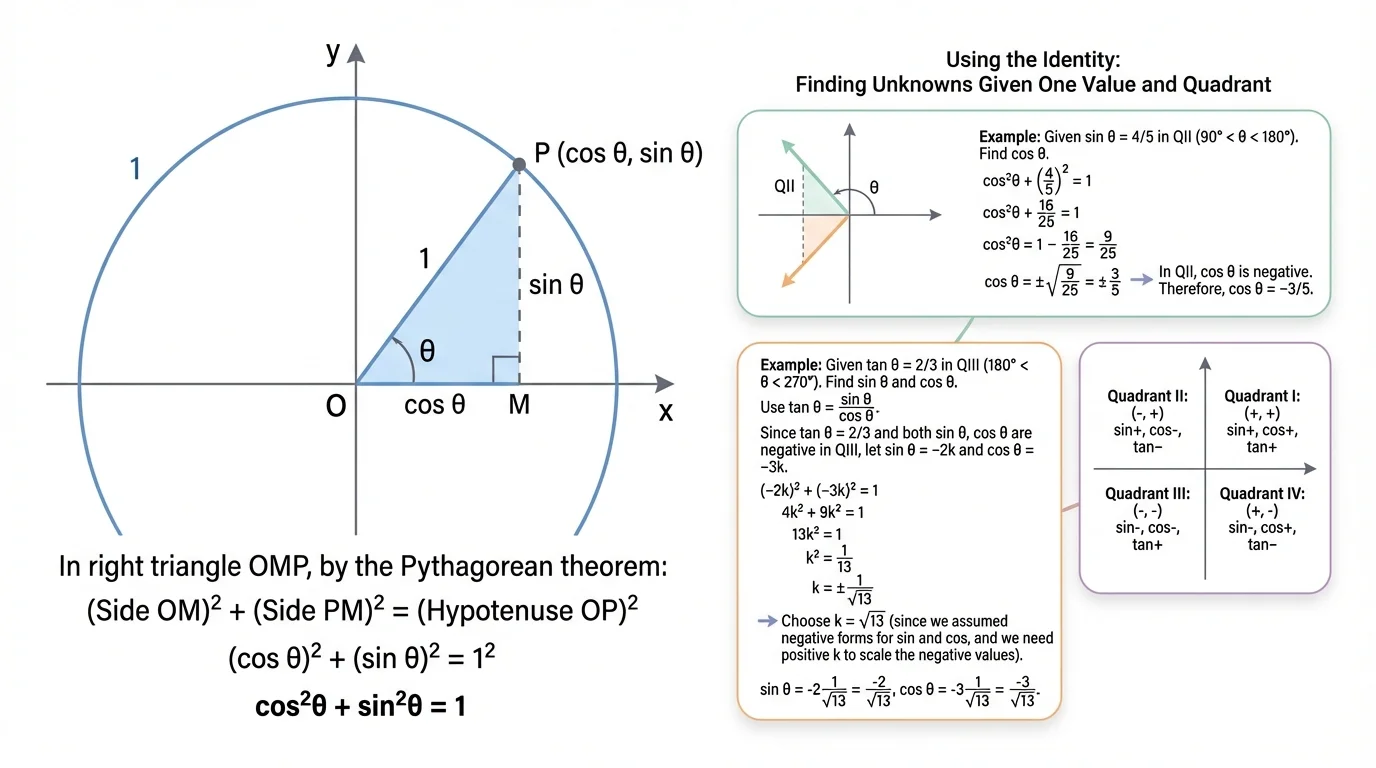
[Figure 2] On the unit circle, every angle \(\theta\) corresponds to a point \((\cos(\theta), \sin(\theta))\). The coordinate picture shows why the identity remains true even for angles larger than \(90^\circ\), negative angles, or angles measured in full rotations.
Because the radius of the unit circle is \(1\), the point \((x, y) = (\cos(\theta), \sin(\theta))\) always satisfies the circle equation
\[x^2 + y^2 = 1\]
Substitute \(x = \cos(\theta)\) and \(y = \sin(\theta)\):
\[\cos^2(\theta) + \sin^2(\theta) = 1\]
This is the same identity again. The unit-circle version is powerful because it explains why the identity works for all angles for which sine and cosine are defined.
Notice something subtle: squaring removes signs. That means \(\sin^2(\theta)\) and \(\cos^2(\theta)\) are always nonnegative, even if \(\sin(\theta)\) or \(\cos(\theta)\) themselves are negative. This is why, when you solve for sine or cosine, you usually get two possible square roots and must use the quadrant to choose the correct one.
Start with the identity
\[\sin^2(\theta) + \cos^2(\theta) = 1\]
If you know \(\sin(\theta)\), then
\[\cos^2(\theta) = 1 - \sin^2(\theta)\]
and therefore
\[\cos(\theta) = \pm\sqrt{1 - \sin^2(\theta)}\]
If you know \(\cos(\theta)\), then
\[\sin^2(\theta) = 1 - \cos^2(\theta)\]
and therefore
\[\sin(\theta) = \pm\sqrt{1 - \cos^2(\theta)}\]
The \(\pm\) symbol matters. Algebra gives both square roots, but the angle's location tells you which sign is correct.
Solved example 1
Given \(\sin(\theta) = \dfrac{3}{5}\) and \(\theta\) is in Quadrant II, find \(\cos(\theta)\) and \(\tan(\theta)\).
Step 1: Use the Pythagorean identity.
\(\cos^2(\theta) = 1 - \sin^2(\theta) = 1 - \left(\dfrac{3}{5}\right)^2 = 1 - \dfrac{9}{25} = \dfrac{16}{25}\).
Step 2: Take the square root.
\(\cos(\theta) = \pm\dfrac{4}{5}\).
Step 3: Use the quadrant to choose the sign.
In Quadrant II, cosine is negative, so \(\cos(\theta) = -\dfrac{4}{5}\).
Step 4: Find tangent.
\(\tan(\theta) = \dfrac{\sin(\theta)}{\cos(\theta)} = \dfrac{3/5}{-4/5} = -\dfrac{3}{4}\).
Therefore, \[\cos(\theta) = -\frac{4}{5}, \qquad \tan(\theta) = -\frac{3}{4}\]
The result makes sense because, in Quadrant II, sine is positive while cosine and tangent are negative.
[Figure 3] Students often do the algebra correctly and still miss the answer because of the sign. The sign pattern across the four quadrants is shown in this figure, and knowing it is essential when using trigonometric identities.
Here is the sign pattern:
| Quadrant | \(\sin(\theta)\) | \(\cos(\theta)\) | \(\tan(\theta)\) |
|---|---|---|---|
| Quadrant I | Positive | Positive | Positive |
| Quadrant II | Positive | Negative | Negative |
| Quadrant III | Negative | Negative | Positive |
| Quadrant IV | Negative | Positive | Negative |
Table 1. Signs of sine, cosine, and tangent in each quadrant.
If an equation gives \(\sin(\theta) = \pm\dfrac{\sqrt{5}}{3}\), that is not the final answer. You still need the quadrant information to decide whether the sign should be positive or negative.
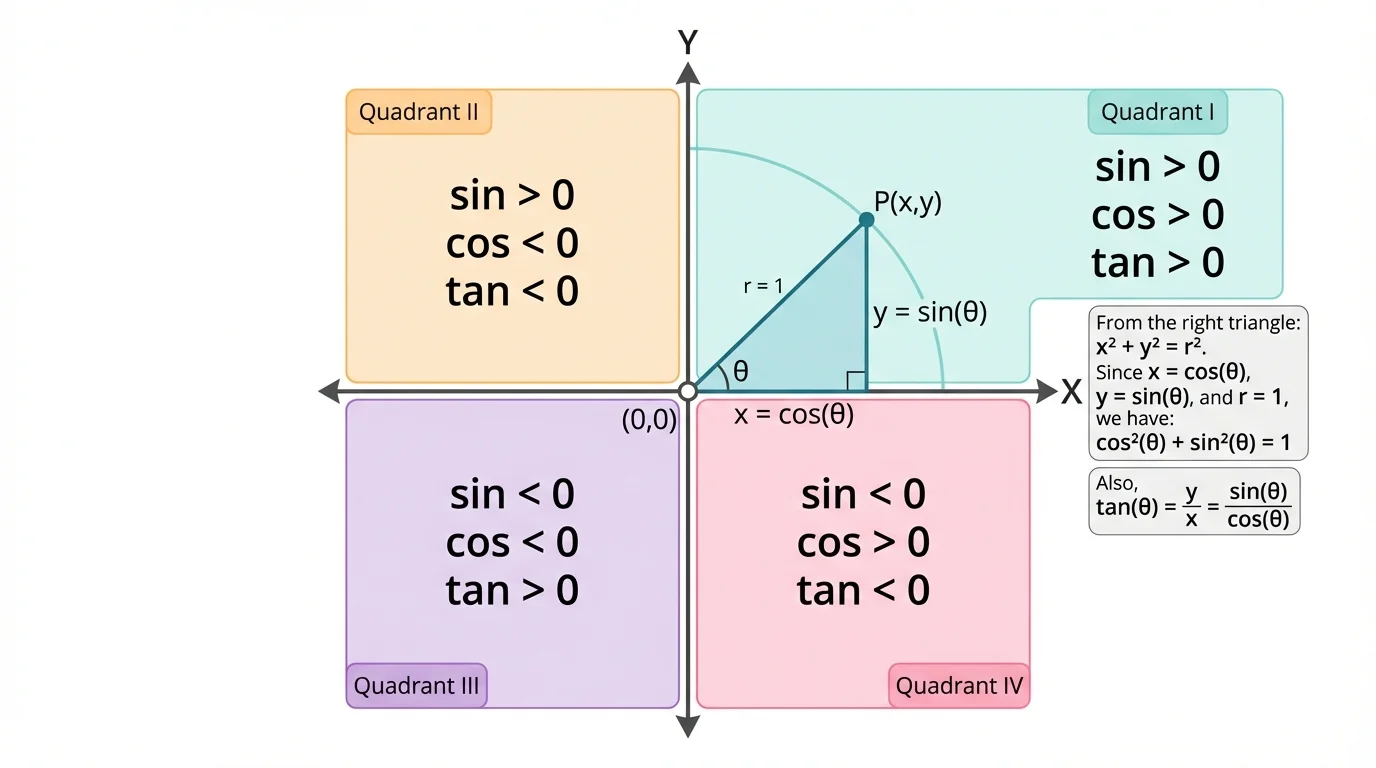
As we saw earlier, sine and cosine come from the \(y\)- and \(x\)-coordinates on the unit circle. So the sign of cosine depends on whether the point is to the right or left of the \(y\)-axis, and the sign of sine depends on whether the point is above or below the \(x\)-axis.
Solved example 2
Given \(\cos(\theta) = -\dfrac{5}{13}\) and \(\theta\) is in Quadrant III, find \(\sin(\theta)\) and \(\tan(\theta)\).
Step 1: Use the identity to find sine.
\(\sin^2(\theta) = 1 - \cos^2(\theta) = 1 - \left(-\dfrac{5}{13}\right)^2 = 1 - \dfrac{25}{169} = \dfrac{144}{169}\).
Step 2: Take the square root.
\(\sin(\theta) = \pm\dfrac{12}{13}\).
Step 3: Use the quadrant.
In Quadrant III, sine is negative, so \(\sin(\theta) = -\dfrac{12}{13}\).
Step 4: Find tangent.
\(\tan(\theta) = \dfrac{\sin(\theta)}{\cos(\theta)} = \dfrac{-12/13}{-5/13} = \dfrac{12}{5}\).
Therefore, \[\sin(\theta) = -\frac{12}{13}, \qquad \tan(\theta) = \frac{12}{5}\]
Quadrant III is a good reminder that both sine and cosine can be negative while tangent is positive. That may seem surprising at first, but it follows directly from the quotient \(\tan(\theta) = \dfrac{\sin(\theta)}{\cos(\theta)}\).
Once you know sine and cosine, tangent is usually straightforward:
\[\tan(\theta) = \frac{\sin(\theta)}{\cos(\theta)}\]
This means you can often solve a problem in two stages: first use the Pythagorean identity to find the missing sine or cosine, then divide to find tangent.
Be careful when \(\cos(\theta) = 0\), because division by zero is undefined. That is why tangent is undefined for angles such as \(90^\circ\) and \(270^\circ\).
Engineers and programmers use these exact relationships when converting between directional components of motion. A drone moving northeast, for example, can be described by horizontal and vertical components tied together by trigonometric identities.
The same logic works in reverse when tangent is known and you want sine or cosine.
If you know \(\tan(\theta)\), you know the ratio of the opposite side to the adjacent side. You can model that ratio with a right triangle, then use the Pythagorean theorem to find the hypotenuse.
For example, if \(\tan(\theta) = \dfrac{3}{4}\), think of a triangle with opposite side \(3\) and adjacent side \(4\). Then the hypotenuse is \(5\), since \(3^2 + 4^2 = 5^2\). So the reference-angle values are \(\sin(\theta) = \dfrac{3}{5}\) and \(\cos(\theta) = \dfrac{4}{5}\), with signs chosen by the quadrant.
There is also an identity involving tangent:
\[1 + \tan^2(\theta) = \sec^2(\theta)\]
This comes from dividing the identity \(\sin^2(\theta) + \cos^2(\theta) = 1\) by \(\cos^2(\theta)\). While that identity is useful, many students find the triangle-ratio method more intuitive when tangent is a fraction.
How the tangent method connects to the Pythagorean identity
If \(\tan(\theta) = \dfrac{\textrm{opposite}}{\textrm{adjacent}}\), then you can assign convenient side lengths that match the ratio. The Pythagorean theorem finds the hypotenuse, and then sine and cosine follow from their definitions. This turns an algebraic ratio into a geometric picture.
That approach is especially helpful when the tangent value forms a familiar Pythagorean triple, such as \(\dfrac{3}{4}\), \(\dfrac{5}{12}\), or \(\dfrac{8}{15}\).
Solved example 3
Given \(\tan(\theta) = -\dfrac{8}{15}\) and \(\theta\) is in Quadrant IV, find \(\sin(\theta)\) and \(\cos(\theta)\).
Step 1: Interpret the tangent ratio.
Since \(\tan(\theta) = \dfrac{\sin(\theta)}{\cos(\theta)} = -\dfrac{8}{15}\), use side lengths with absolute values \(8\) and \(15\).
Step 2: Find the hypotenuse.
\(\sqrt{8^2 + 15^2} = \sqrt{64 + 225} = \sqrt{289} = 17\).
Step 3: Write the reference-angle trigonometric ratios.
Using the triangle, \(|\sin(\theta)| = \dfrac{8}{17}\) and \(|\cos(\theta)| = \dfrac{15}{17}\).
Step 4: Use the quadrant for signs.
In Quadrant IV, sine is negative and cosine is positive. Therefore \(\sin(\theta) = -\dfrac{8}{17}\) and \(\cos(\theta) = \dfrac{15}{17}\).
Therefore, \[\sin(\theta) = -\frac{8}{17}, \qquad \cos(\theta) = \frac{15}{17}\]
You can check the answer quickly: \(\dfrac{-8/17}{15/17} = -\dfrac{8}{15}\), which matches the given tangent value.
Solved example 4
Given \(\sin(\theta) = -\dfrac{7}{25}\) and \(\theta\) is in Quadrant IV, find \(\cos(\theta)\) and \(\tan(\theta)\).
Step 1: Use the identity.
\(\cos^2(\theta) = 1 - \sin^2(\theta) = 1 - \left(-\dfrac{7}{25}\right)^2 = 1 - \dfrac{49}{625} = \dfrac{576}{625}\).
Step 2: Take the square root.
\(\cos(\theta) = \pm\dfrac{24}{25}\).
Step 3: Use the quadrant.
In Quadrant IV, cosine is positive, so \(\cos(\theta) = \dfrac{24}{25}\).
Step 4: Find tangent.
\(\tan(\theta) = \dfrac{-7/25}{24/25} = -\dfrac{7}{24}\).
Therefore, \[\cos(\theta) = \frac{24}{25}, \qquad \tan(\theta) = -\frac{7}{24}\]
One common mistake is forgetting to square the entire trig value. For example, if \(\sin(\theta) = \dfrac{3}{5}\), then \(\sin^2(\theta) = \left(\dfrac{3}{5}\right)^2 = \dfrac{9}{25}\), not \(\dfrac{3}{25}\).
Another common mistake is taking only the positive square root. Algebra alone gives \(\pm\sqrt{\phantom{x}}\). The sign must come from the quadrant. The sign chart in [Figure 3] is especially useful for checking this step.
A third mistake is mixing up the formulas. Remember:
You can also verify answers numerically. If you found \(\sin(\theta) = -\dfrac{12}{13}\) and \(\cos(\theta) = -\dfrac{5}{13}\), check that \(\left(-\dfrac{12}{13}\right)^2 + \left(-\dfrac{5}{13}\right)^2 = \dfrac{144}{169} + \dfrac{25}{169} = 1\).
"An identity is not just true sometimes. It is true every time the expressions are defined."
That idea is what makes identities so useful: once proved, they become reliable tools in every trig problem of the same type.
Trigonometric identities are not just classroom exercises. In physics, a force vector can be split into horizontal and vertical components using sine and cosine. In navigation, a direction and distance can be converted into east-west and north-south motion. In digital graphics, rotations on a screen use sine and cosine together constantly.
Suppose a ramp rises at angle \(\theta\). The horizontal part of a length \(L\) is related to \(\cos(\theta)\), and the vertical rise is related to \(\sin(\theta)\). Because these components fit into a right triangle, the identity \(\sin^2(\theta) + \cos^2(\theta) = 1\) reflects the same geometric structure that keeps bridges, roofs, and support beams consistent.
The unit-circle picture from [Figure 2] also appears in wave motion. Sound, light, and alternating electrical current all rely on relationships between sine and cosine that are tied to circular motion and periodic behavior.