A calculator can tell you that \(\sin^{-1}(0.6)\) is an angle, but why is that even allowed when the sine graph repeats forever? That question gets to a deep and important idea in mathematics: an inverse function can only exist if each output comes from exactly one input. Trigonometric functions are periodic, so they naturally repeat values. To construct their inverses, we must first choose a domain where each output appears only once.
An inverse function "undoes" another function. If \(f(a)=b\), then its inverse satisfies \(f^{-1}(b)=a\). But this only works cleanly when the original function is one-to-one. A function is one-to-one if different inputs always produce different outputs. On a graph, this means every horizontal line hits the graph at most once.
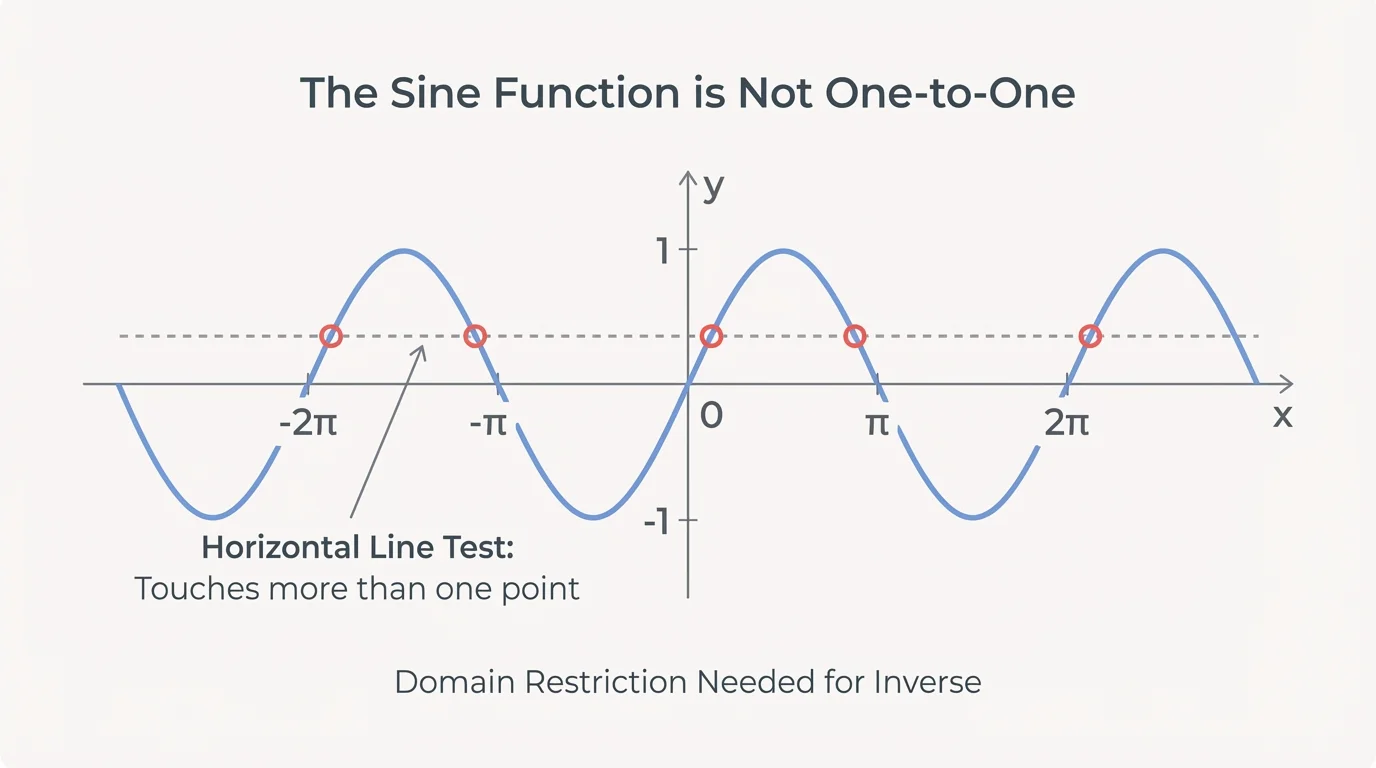
The periodic function nature of trigonometric functions prevents this on their full domains. For example, \(\sin(0)=0\), \(\sin(\pi)=0\), and \(\sin(2\pi)=0\). The same output, \(0\), comes from many different inputs. As [Figure 1] shows, a horizontal line such as \(y=\dfrac{1}{2}\) crosses the full sine graph many times, so the sine function fails the horizontal line test.
This means that if we tried to define the inverse of sine on all real numbers, the value \(\sin^{-1}\left(\dfrac{1}{2}\right)\) would have many possible answers, including \(\dfrac{\pi}{6}\), \(\dfrac{5\pi}{6}\), and infinitely many others. A function cannot assign one input to many outputs, so we need a fix.
The fix is not to change the formula for sine, cosine, or tangent. Instead, we change the set of inputs we allow. This is called restricting the domain.
Restricting the domain means limiting the inputs of a function to a smaller interval. If that interval makes the function always increasing or always decreasing, then each output comes from exactly one input, and the inverse can be defined.
Inverse trigonometric functions are the inverses of restricted trigonometric functions. Their outputs are angles taken from the chosen restricted intervals.
When a function is always increasing or always decreasing on an interval, it is called monotonic on that interval. Monotonic behavior matters because it guarantees one-to-one matching between inputs and outputs. That is the key idea behind constructing inverse trigonometric functions.
For inverse trigonometric functions, mathematicians use standard restricted intervals. These are not the only possible intervals, but they are especially useful because they are continuous, simple, and match common geometric interpretations of angles.
The main goal is to choose an interval where the trig function never turns around. If the graph keeps rising, or keeps falling, then no output repeats. Once that happens, the inverse is a true function.
For sine, the standard restriction is \(\left[-\dfrac{\pi}{2},\dfrac{\pi}{2}\right]\). On this interval, sine moves steadily upward from \(-1\) to \(1\). For cosine, the standard restriction is \([0,\pi]\). On this interval, cosine moves steadily downward from \(1\) to \(-1\). For tangent, the standard restriction is \(\left(-\dfrac{\pi}{2},\dfrac{\pi}{2}\right)\). On this interval, tangent increases continuously through all real outputs.
| Function | Standard restricted domain | Behavior on that domain | Range on that domain | Inverse |
|---|---|---|---|---|
| \(\sin x\) | \(\left[-\dfrac{\pi}{2},\dfrac{\pi}{2}\right]\) | Increasing | \([-1,1]\) | \(\sin^{-1}x\) or \(\arcsin x\) |
| \(\cos x\) | \([0,\pi]\) | Decreasing | \([-1,1]\) | \(\cos^{-1}x\) or \(\arccos x\) |
| \(\tan x\) | \(\left(-\dfrac{\pi}{2},\dfrac{\pi}{2}\right)\) | Increasing | \(( -\infty, \infty )\) | \(\tan^{-1}x\) or \(\arctan x\) |
Table 1. Standard domain restrictions used to define the inverse trigonometric functions.
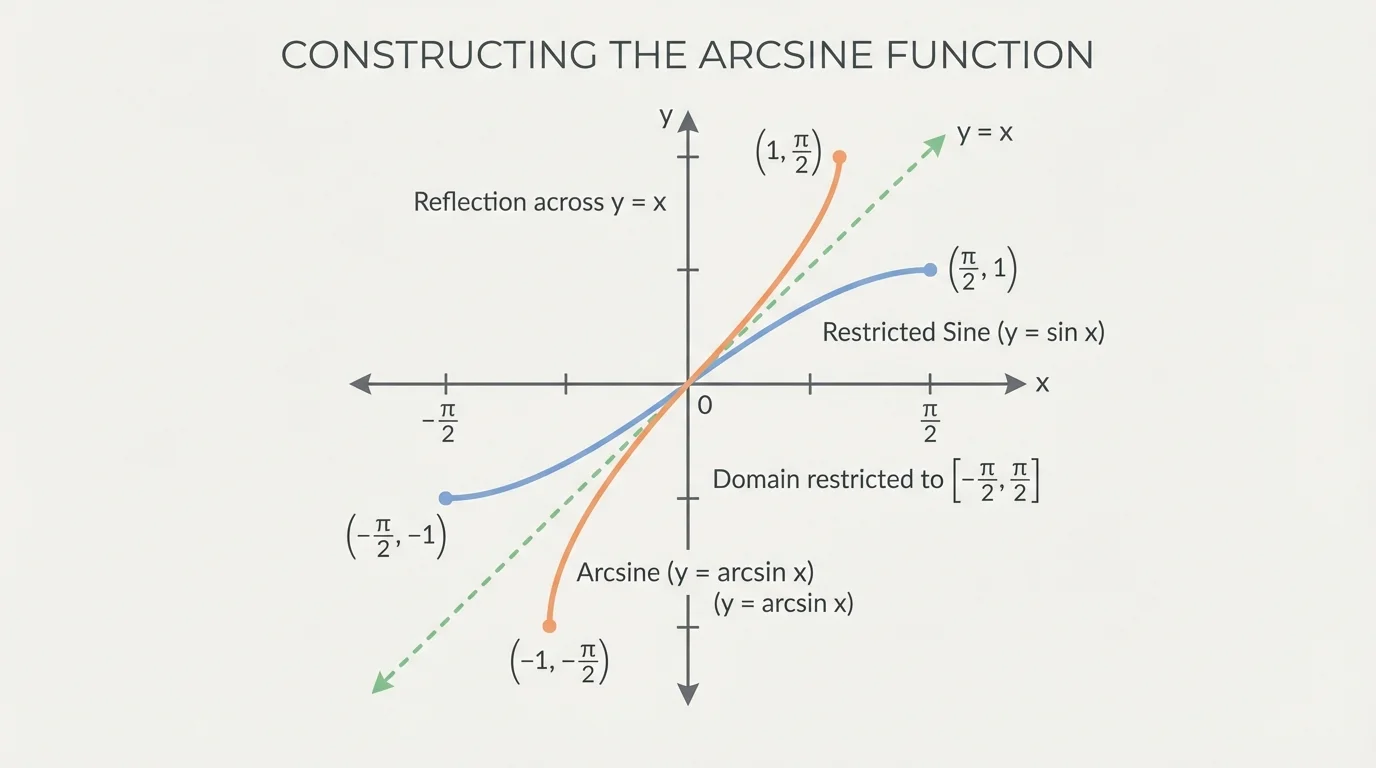
The sine function becomes invertible when we restrict its domain to \(\left[-\dfrac{\pi}{2},\dfrac{\pi}{2}\right]\). As [Figure 2] shows, on that interval every larger input gives a larger output, so sine is one-to-one. The restricted sine graph can be reflected across the line \(y=x\) to create its inverse graph.
After restricting the domain, the range of sine is still \([-1,1]\). That means the inverse sine function, written \(\arcsin x\) or \(\sin^{-1}x\), has domain \([-1,1]\) and range \(\left[-\dfrac{\pi}{2},\dfrac{\pi}{2}\right]\).
So when we write \(\arcsin\left(\dfrac{1}{2}\right)\), we do not mean "all angles whose sine is \(\dfrac{1}{2}\)." We mean the principal value: the one angle in the restricted interval whose sine is \(\dfrac{1}{2}\). That angle is \(\dfrac{\pi}{6}\).
The defining relationship is
\[y=\arcsin(x) \quad \textrm{means} \quad \sin(y)=x \textrm{ with } y \in \left[-\frac{\pi}{2},\frac{\pi}{2}\right].\]
This restriction is powerful because it turns a repeating wave into something reversible. Later, when solving equations, you can still find other angle solutions using periodicity, but the inverse function itself returns only the principal value. We will come back to that distinction in the examples.
Inverse sine and inverse cosine are used in computer graphics and robotics whenever a system needs to recover an angle from coordinate data, such as the direction of a moving object or the bend of a mechanical arm.
Another useful fact is that the graph of an inverse function swaps domain and range. That is why the restricted sine graph and the arcsine graph are reflections of each other across \(y=x\).
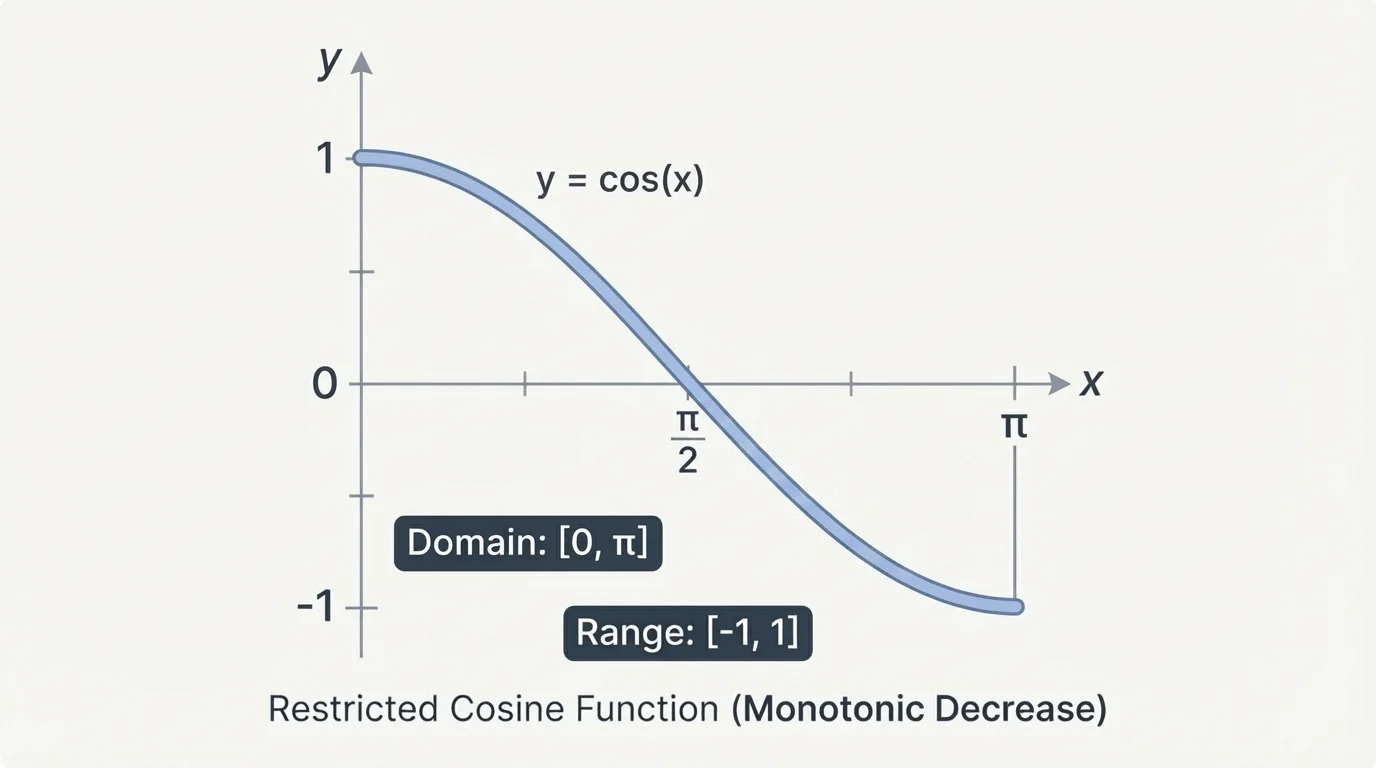
Cosine needs a different restricted interval because cosine is not increasing on \(\left[-\dfrac{\pi}{2},\dfrac{\pi}{2}\right]\). As [Figure 3] shows, the standard choice is \([0,\pi]\). On this interval, cosine decreases steadily from \(1\) to \(-1\).
Because cosine is always decreasing on \([0,\pi]\), each output in \([-1,1]\) occurs exactly once there. So we define \(\arccos x\) using that interval. Its domain is \([-1,1]\), and its range is \([0,\pi]\).
The defining relationship is
\[y=\arccos(x) \quad \textrm{means} \quad \cos(y)=x \textrm{ with } y \in [0,\pi].\]
For example, \(\arccos\left(-\dfrac{1}{2}\right)=\dfrac{2\pi}{3}\), because \(\dfrac{2\pi}{3}\) lies in \([0,\pi]\) and satisfies \(\cos\left(\dfrac{2\pi}{3}\right)=-\dfrac{1}{2}\).
Notice something subtle: cosine is invertible on this interval even though it is decreasing, not increasing. That is enough. A function does not need to rise to have an inverse; it only needs to avoid repeating outputs. Always increasing or always decreasing both work.
This becomes especially important in applications involving angles of rotation, because cosine often appears when analyzing horizontal position in circular motion and periodic models.
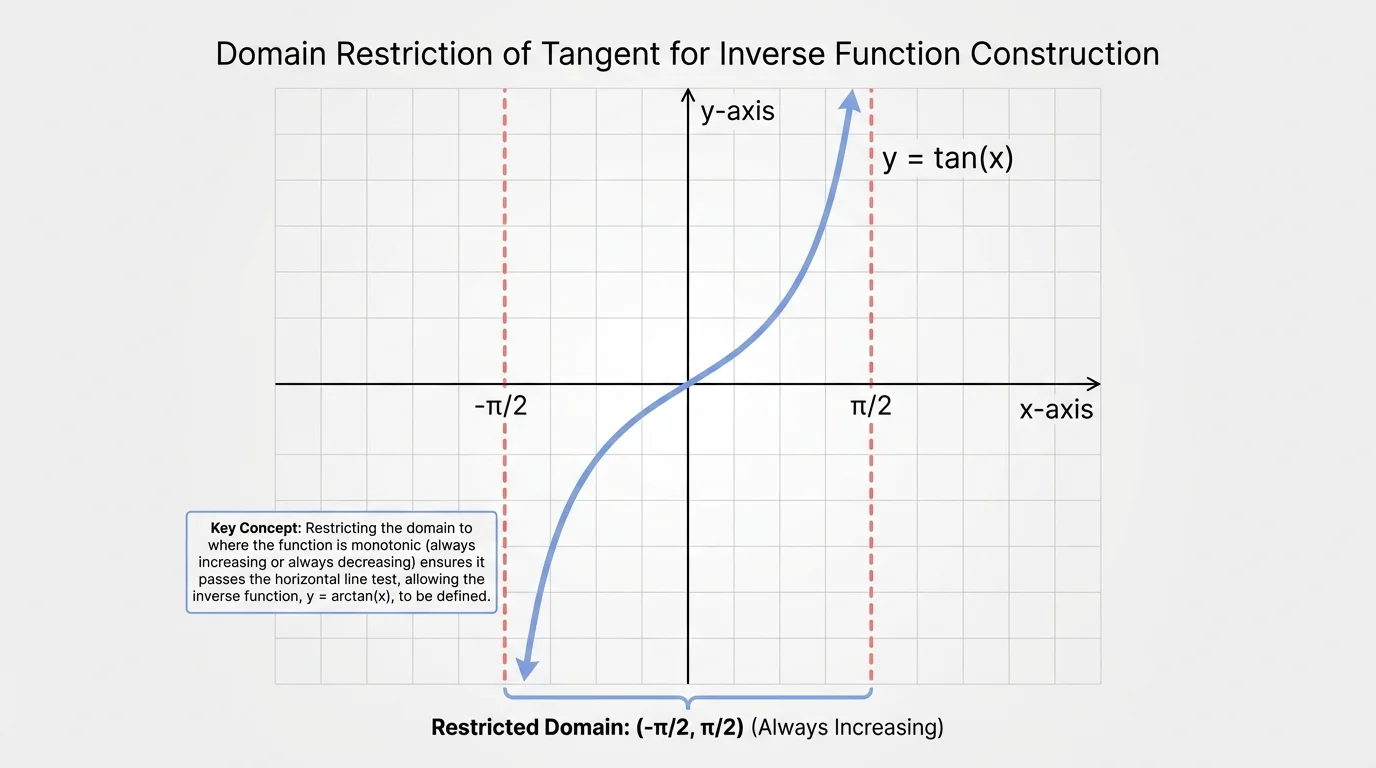
Tangent is different from sine and cosine because its outputs are not limited to \([-1,1]\). On the restricted domain \(\left(-\dfrac{\pi}{2},\dfrac{\pi}{2}\right)\), tangent increases continuously through every real number, as shown in [Figure 4].
The endpoints are not included because tangent is undefined at \(x=\pm \dfrac{\pi}{2}\). Those are vertical asymptotes. Between them, tangent never repeats a value, so it is one-to-one there.
This lets us define \(\arctan x\), whose domain is all real numbers and whose range is \(\left(-\dfrac{\pi}{2},\dfrac{\pi}{2}\right)\).
The defining relationship is
\[y=\arctan(x) \quad \textrm{means} \quad \tan(y)=x \textrm{ with } y \in \left(-\frac{\pi}{2},\frac{\pi}{2}\right).\]
For instance, \(\arctan(1)=\dfrac{\pi}{4}\), because \(\tan\left(\dfrac{\pi}{4}\right)=1\) and \(\dfrac{\pi}{4}\) lies in the restricted interval.
Tangent is especially useful in real-world models involving slope, steepness, and direction. Later, when finding the angle of a ramp, a flight path, or a line of sight, \(\arctan\) often appears naturally.
To understand inverse trigonometric functions well, remember two earlier ideas: a function needs to be one-to-one to have an inverse, and inverse functions reverse the roles of domain and range.
That domain-range reversal helps explain why \(\tan x\), which on its restricted domain has range all real numbers, gives rise to \(\arctan x\) with domain all real numbers. The same logic works for sine and cosine, but their ranges stay within \([-1,1]\).
Worked example 1
Evaluate \(\arcsin\left(-\dfrac{\sqrt{3}}{2}\right)\).
Step 1: Identify the restricted range for inverse sine.
The output of \(\arcsin x\) must lie in \(\left[-\dfrac{\pi}{2},\dfrac{\pi}{2}\right]\).
Step 2: Find an angle in that interval whose sine is \(-\dfrac{\sqrt{3}}{2}\).
We know \(\sin\left(-\dfrac{\pi}{3}\right)=-\dfrac{\sqrt{3}}{2}\).
Step 3: State the principal value.
Since \(-\dfrac{\pi}{3}\) is in the correct interval,
\[\arcsin\left(-\frac{\sqrt{3}}{2}\right)=-\frac{\pi}{3}.\]
The value is \(-\dfrac{\pi}{3}\).
This example shows why the restricted interval matters. There are many angles with sine \(-\dfrac{\sqrt{3}}{2}\), but only one of them belongs to the output range of inverse sine.
Worked example 2
Solve \(\cos x=\dfrac{1}{2}\) for the principal value using inverse cosine.
Step 1: Apply inverse cosine to both sides.
We write \(x=\arccos\left(\dfrac{1}{2}\right)\) for the principal value.
Step 2: Find the angle in the range of \(\arccos\).
The range of \(\arccos\) is \([0,\pi]\). In that interval, \(\cos\left(\dfrac{\pi}{3}\right)=\dfrac{1}{2}\).
Step 3: State the answer.
\[x=\frac{\pi}{3}.\]
The principal value is \(\dfrac{\pi}{3}\).
If you were solving the full trigonometric equation rather than just finding the principal value, you would use periodicity and symmetry to find more solutions. But inverse cosine itself returns only the angle in \([0,\pi]\).
Worked example 3
Evaluate \(\arctan(-\sqrt{3})\).
Step 1: Recall the output interval for inverse tangent.
The range of \(\arctan\) is \(\left(-\dfrac{\pi}{2},\dfrac{\pi}{2}\right)\).
Step 2: Find an angle in that interval with tangent \(-\sqrt{3}\).
We know \(\tan\left(-\dfrac{\pi}{3}\right)=-\sqrt{3}\).
Step 3: Confirm and write the answer.
Since \(-\dfrac{\pi}{3}\) lies in the required interval,
\[\arctan(-\sqrt{3})=-\frac{\pi}{3}.\]
The value is \(-\dfrac{\pi}{3}\).
The tangent graph in [Figure 4] helps explain why there is exactly one such angle in the principal interval even though tangent repeats every \(\pi\) outside that interval.
Worked example 4
Solve \(\sin x=0.8\) for the principal value to the nearest hundredth of a radian.
Step 1: Use inverse sine.
For the principal value, \(x=\arcsin(0.8)\).
Step 2: Evaluate.
Using a calculator in radian mode, \(\arcsin(0.8) \approx 0.93\).
Step 3: State the principal value.
\[x \approx 0.93\]
The principal value is \(0.93\) radians.
Notice that \(0.8\) is allowed as an input to inverse sine because it is in the interval \([-1,1]\). If someone tries to compute \(\arcsin(1.2)\), there is no real answer because sine never reaches \(1.2\).
Inverse trigonometric functions are not just abstract definitions. They are tools for recovering angles from measured quantities. That makes them useful whenever a periodic or geometric situation gives you a ratio and you need the angle behind it.
In wave modeling, the height of a point on a Ferris wheel or the vertical displacement of a vibrating string may be modeled by a sine or cosine function. If you know the height and need the angle or phase, inverse sine or inverse cosine gives that information. The restricted domain matters because a single height can happen at more than one time in the cycle, so the inverse function returns the principal angle first.
In navigation and engineering, tangent connects slope and angle. If a road rises \(5\) meters for every \(20\) meters of horizontal distance, then its angle of elevation \(\theta\) satisfies \(\tan\theta=\dfrac{5}{20}=0.25\). The angle is \(\theta=\arctan(0.25)\). Engineers use this idea when designing ramps, roofs, and drainage systems.
In physics and robotics, coordinate components often reveal sine and cosine values. To reconstruct direction from those values, one uses inverse trig functions. The standard principal-value conventions keep answers consistent across calculators, textbooks, and software.
Why standard intervals are chosen
Other restricted intervals could also make a trigonometric function one-to-one. For example, sine is also one-to-one on \([\dfrac{\pi}{2},\dfrac{3\pi}{2}]\), where it is decreasing. But standard intervals are chosen so inverse functions have outputs that are convenient, symmetric when possible, and widely agreed upon.
That consistency matters. If every calculator used a different restricted interval, then \(\arcsin(0.5)\) might return different answers depending on the device. Standardization keeps mathematics usable.
One common mistake is confusing \(\sin^{-1}x\) with \(\dfrac{1}{\sin x}\). They are not the same. The notation \(\sin^{-1}x\) means inverse sine, while \(\dfrac{1}{\sin x}\) is called cosecant and is written \(\csc x\).
Another common mistake is forgetting the output interval. For example, \(\arccos\left(-\dfrac{\sqrt{2}}{2}\right)\) is not \(-\dfrac{\pi}{4}\), because \(\arccos\) must return an angle in \([0,\pi]\). The correct answer is \(\dfrac{3\pi}{4}\), since \(\cos\left(\dfrac{3\pi}{4}\right)=-\dfrac{\sqrt{2}}{2}\).
Students also mix up domain and range. For \(\arcsin x\), the input must satisfy \(-1 \le x \le 1\), and the output angle satisfies \(-\dfrac{\pi}{2} \le y \le \dfrac{\pi}{2}\). For \(\arctan x\), any real number can be an input, but the output is always between \(-\dfrac{\pi}{2}\) and \(\dfrac{\pi}{2}\), not including the endpoints.
Finally, remember that inverse trig functions usually give principal values, not all possible solutions. When solving equations in a larger context, you may need to use periodic patterns after finding the principal value.