A smartphone screen rotates, a satellite image is flipped by software, and a robot arm turns a part into place. All of these actions rely on the same geometric idea: a figure can move in the plane without changing its size or shape. Geometry gives precise rules for these motions, and once you understand them, you can predict exactly where every point lands.
In geometry, a figure can be moved in ways that keep it congruent to the original. These motions help us compare shapes, describe symmetry, and prove geometric relationships. They also appear in computer graphics, engineering drawings, architecture, and navigation systems.
When you draw a transformed figure, you are taking every point of the original figure and sending it to a new location according to a rule. The new figure is called the image. If the movement is a translation, reflection, or rotation, the transformation is a rigid motion, meaning distances and angle measures stay the same.
Transformation means a rule that maps every point of a figure to a new point.
Preimage is the original figure before a transformation.
Image is the figure after the transformation.
Rigid motion is a transformation that preserves lengths and angle measures, so the image is congruent to the preimage.
Because rigid motions preserve size and shape, they are powerful tools for deciding when two figures are congruent. If one figure can be moved onto another by a sequence of rigid motions, then the two figures match exactly.
On a coordinate plane, each vertex is identified by an ordered pair such as \((2, -1)\). To transform a polygon, transform each vertex and then connect the image points in the same order. This point-by-point approach is especially useful on graph paper or in geometry software.
When naming images, a prime mark is often used. For example, if triangle \(ABC\) is transformed, its image may be labeled \(A'B'C'\). If a second transformation is applied, the next image may be labeled \(A''B''C''\).
Recall that congruent figures have the same side lengths and the same angle measures. A rigid motion does not stretch, shrink, or distort a figure; it only changes position or orientation.
One subtle but important idea is orientation. A translation keeps orientation the same. A rotation also keeps orientation the same, although the figure turns. A reflection reverses orientation, creating a mirror image. This becomes extremely important when deciding which transformation, or sequence of transformations, maps one figure onto another.
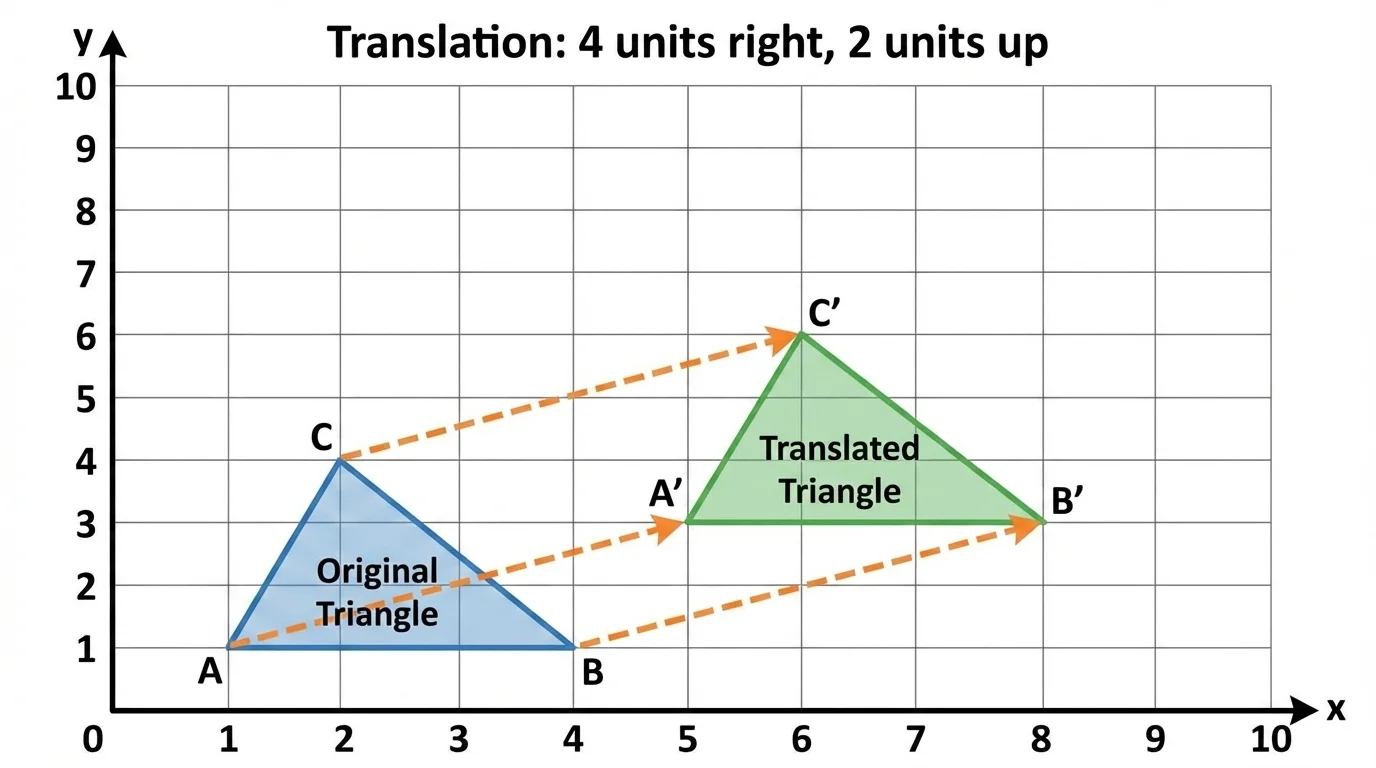
A translation slides a figure so that every point moves the same distance in the same direction. No turning and no flipping occur. If point \(A\) moves \(4\) units right and \(2\) units up, then every other point in the figure must also move \(4\) units right and \(2\) units up.
[Figure 1] On a coordinate plane, a translation by vector \(\langle a, b \rangle\) follows the rule \((x, y) \rightarrow (x+a, y+b)\). For example, the translation \(\langle 3, -2 \rangle\) sends \((x, y)\) to \((x+3, y-2)\).
To draw a translation, start with each vertex of the preimage. Count the horizontal movement first, then the vertical movement. Plot the image of each vertex, and connect the new points in order. The side lengths and angle measures remain unchanged.
Suppose triangle \(ABC\) has vertices \(A(1,1)\), \(B(3,1)\), and \(C(2,4)\). A translation by \(\langle 4, -1 \rangle\) gives \(A'(5,0)\), \(B'(7,0)\), and \(C'(6,3)\). Notice that the shape and orientation are unchanged; only the location is different.
Later, when you compare two figures, the pattern seen in [Figure 1] helps you recognize a translation quickly: corresponding sides remain parallel, corresponding vertices all shift by the same vector, and the figure does not flip.
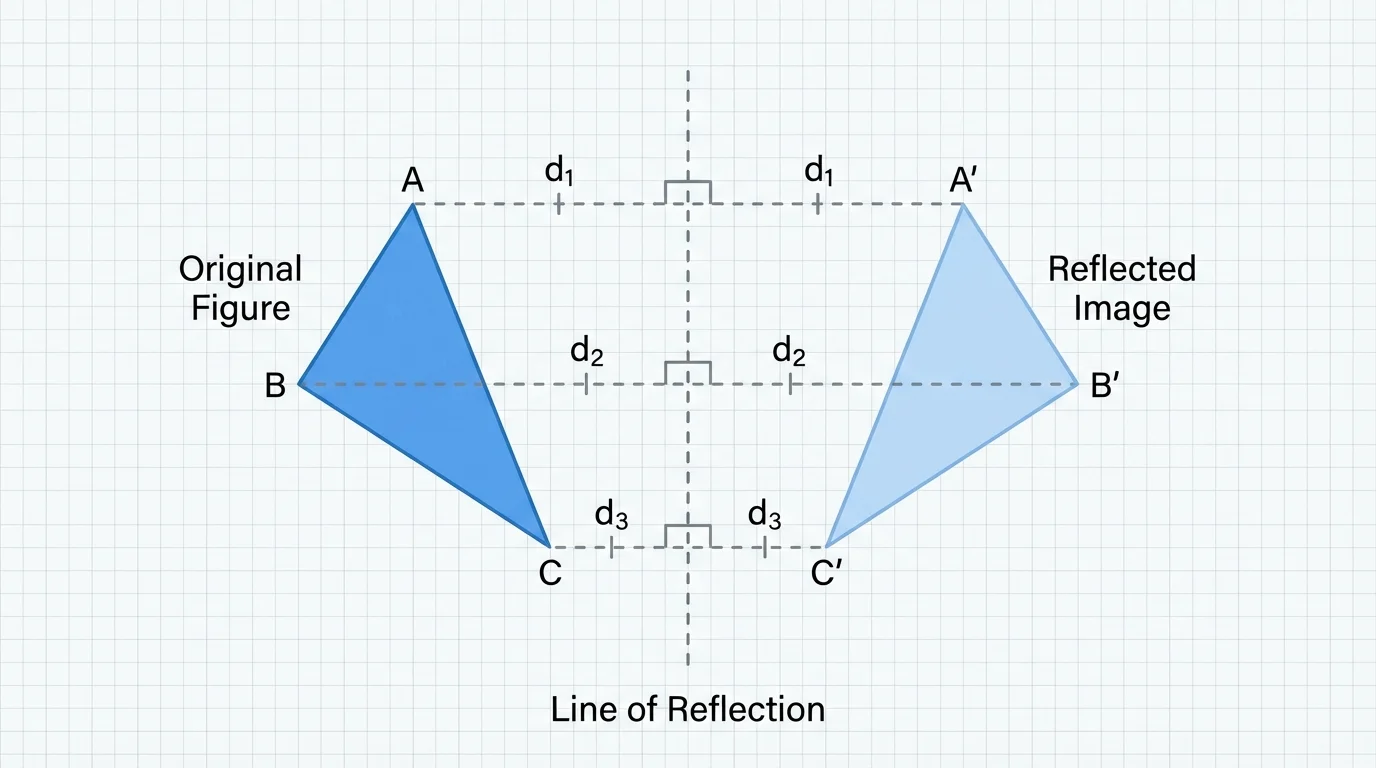
A reflection flips a figure across a line, called the line of reflection. Each point and its image lie the same perpendicular distance from the mirror line. This means the line of reflection is the perpendicular bisector of the segment joining a point to its image.
[Figure 2] Reflections preserve lengths and angles, but they reverse orientation. That reversal is often the key clue that a reflection is involved. If one figure looks like a mirror image of another, a reflection is usually necessary somewhere in the sequence.
Some especially useful coordinate rules are these:
For reflections across vertical or horizontal lines other than the axes, use distance reasoning. If a point is \(3\) units to the left of the mirror line, its image is \(3\) units to the right of that same line.
For example, if point \(P(2,5)\) is reflected across the line \(x=4\), the image lies \(2\) units to the right of \(x=4\), so \(P'(6,5)\). The \(y\)-coordinate stays the same because the reflection line is vertical.
When you later identify a transformation sequence, the equal-distance idea from [Figure 2] helps you test whether a reflection is correct. If corresponding points are not equally spaced from the mirror line, then the chosen line of reflection is wrong.
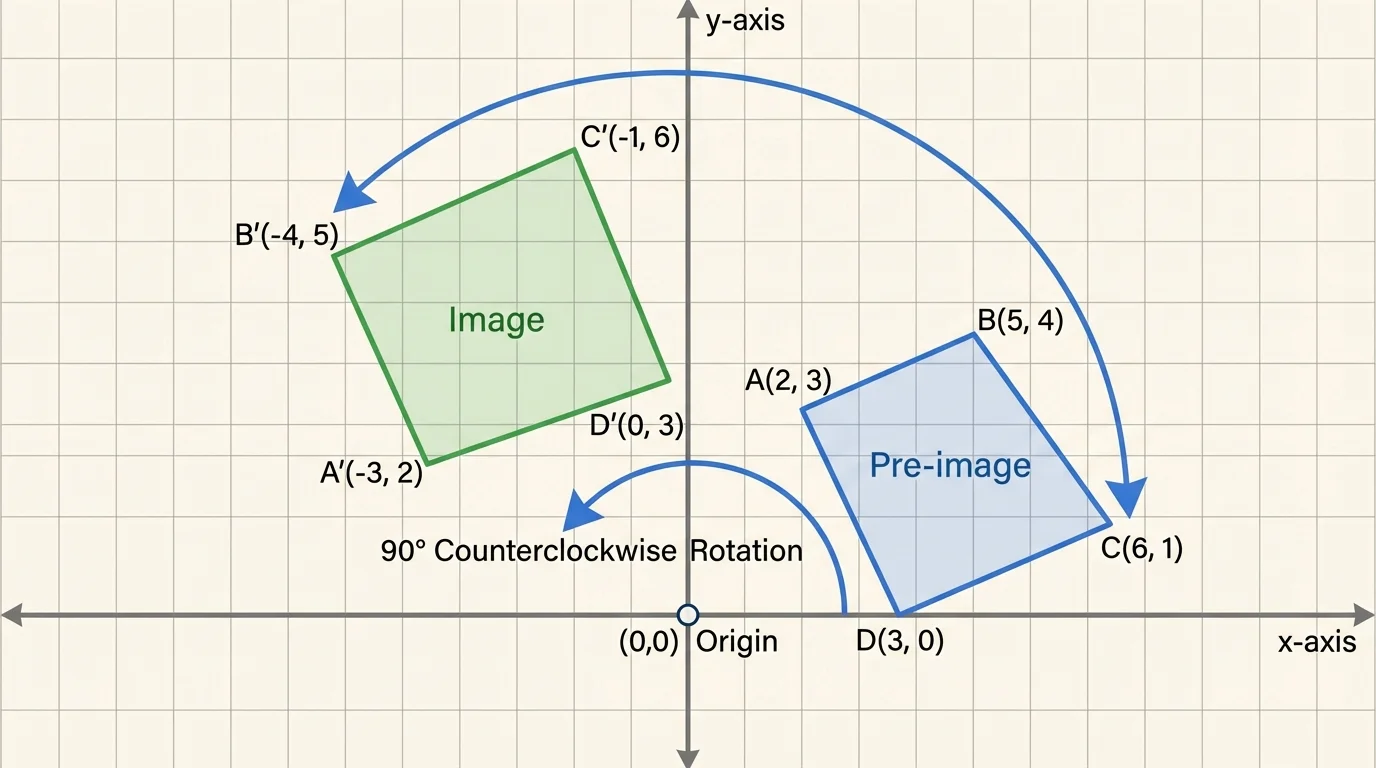
A rotation turns a figure around a fixed point called the center of rotation. The amount of turn is measured by an angle, often \(90^\circ\), \(180^\circ\), or \(270^\circ\). You must also know the direction: clockwise or counterclockwise.
[Figure 3] In a rotation, every point stays the same distance from the center. A rotation preserves lengths, angle measures, and orientation. Unlike a reflection, it does not produce a mirror image.
When rotating about the origin, these coordinate rules are especially useful:
To rotate a point that is not around the origin, it often helps to use tracing paper, geometry software, or careful distance-and-angle reasoning. The point must move along a circular path centered at the center of rotation.
For instance, if \(Q(-2, 5)\) is rotated \(90^\circ\) counterclockwise about the origin, then \(Q'(-5, -2)\). If it is rotated \(180^\circ\), then \(Q'(2, -5)\).
The circular turning pattern in [Figure 3] is useful when checking work. If your image point is not the same distance from the center as the original point, the rotation is not drawn correctly.
A single transformation is sometimes not enough to map one figure onto another. In that case, use a sequence of transformations. Order matters. A reflection followed by a translation usually gives a different result from a translation followed by a reflection.
Suppose a figure is first reflected across the \(y\)-axis and then translated \(3\) units up. A point \((x, y)\) first becomes \((-x, y)\), then \((-x, y+3)\). If you reverse the order, the intermediate and final positions may change.
How to think about a sequence
When describing a sequence, track one or two easy points first. Ask three questions: Does the figure flip, turn, or only slide? Does orientation stay the same or reverse? After the first move, what second move places the image exactly on the target figure? This process turns a complicated match into a set of smaller, clearer decisions.
Sequences are often written in words, but they can also be represented point by point. For example, if a translation by \(\langle 2,1 \rangle\) is followed by a reflection across the \(x\)-axis, then \((x,y)\) goes to \((x+2, y+1)\) and then to \((x+2, -(y+1))\).
When two congruent figures are given, the strategy starts with careful observation: compare corresponding side lengths, compare orientation, and note whether one figure appears turned, slid, or mirrored. If orientation is reversed, a reflection is likely involved. If orientation is preserved, think first about a translation or rotation.
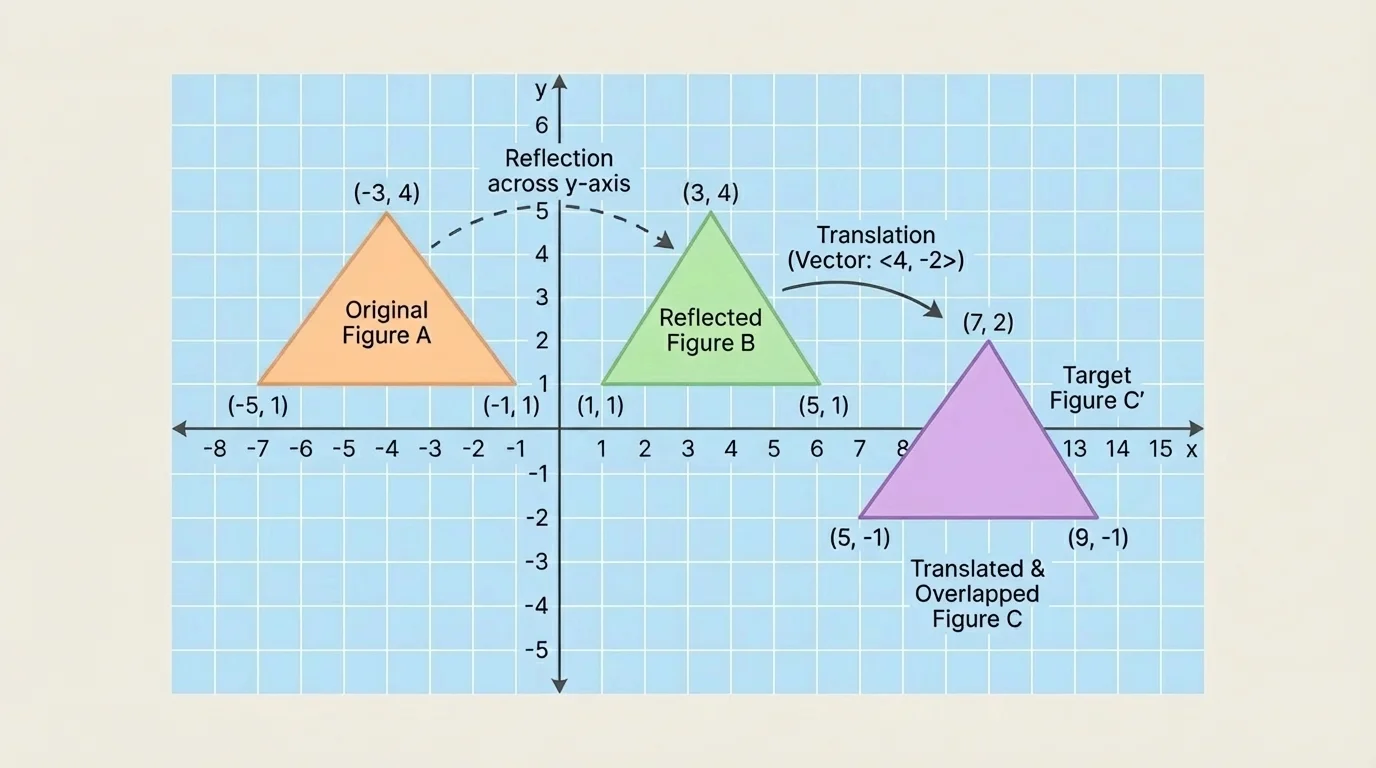
[Figure 4] A practical method is to match one convenient vertex first, then test whether nearby sides line up. If one vertex can be moved onto its match by a translation but the rest of the figure still points the wrong way, then a rotation or reflection is still needed. If the figure already has the correct orientation but is in the wrong place, a final translation will complete the mapping.
Sometimes several correct sequences exist. For example, a square may be mapped onto another congruent square by different combinations of rotations and translations. What matters is that every point of the first figure lands exactly on the corresponding point of the second figure.
When you justify a sequence, be precise. Instead of saying "move it over there," say "reflect triangle \(ABC\) across the \(y\)-axis, then translate the image \(5\) units right and \(2\) units up." Mathematics values exact descriptions.
The best way to become confident is to follow each point carefully and describe exactly what happens.
Worked example 1: Draw a translation on the coordinate plane
Quadrilateral \(ABCD\) has vertices \(A(-1,2)\), \(B(2,2)\), \(C(3,5)\), and \(D(0,4)\). Translate it by \(\langle 4, -3 \rangle\).
Step 1: Write the translation rule.
The rule is \((x, y) \rightarrow (x+4, y-3)\).
Step 2: Apply the rule to each vertex.
\(A(-1,2) \rightarrow A'(3,-1)\)
\(B(2,2) \rightarrow B'(6,-1)\)
\(C(3,5) \rightarrow C'(7,2)\)
\(D(0,4) \rightarrow D'(4,1)\)
Step 3: Plot the image points and connect them in order.
The image is quadrilateral \(A'B'C'D'\) with vertices \(A'(3,-1)\), \(B'(6,-1)\), \(C'(7,2)\), and \(D'(4,1)\).
The translated figure has the same shape and orientation as the original because a translation is a rigid motion.
Notice that every vertex moved by the same vector. This is exactly the pattern emphasized earlier in [Figure 1].
Worked example 2: Reflect a triangle across a line
Triangle \(PQR\) has vertices \(P(1,1)\), \(Q(4,2)\), and \(R(2,5)\). Reflect it across the \(y\)-axis.
Step 1: Use the coordinate rule for reflection across the \(y\)-axis.
\((x, y) \rightarrow (-x, y)\)
Step 2: Transform each vertex.
\(P(1,1) \rightarrow P'(-1,1)\)
\(Q(4,2) \rightarrow Q'(-4,2)\)
\(R(2,5) \rightarrow R'(-2,5)\)
Step 3: Check the geometry.
Each image point is the same distance from the \(y\)-axis as the original point, but on the opposite side.
The reflected image is triangle \(P'Q'R'\) with vertices \((-1,1)\), \((-4,2)\), and \((-2,5)\).
This example also shows orientation reversal: the triangle becomes a mirror image. That is the main clue that a reflection occurred, just as the mirror-line geometry in [Figure 2] suggests.
Worked example 3: Rotate a figure about the origin
Triangle \(XYZ\) has vertices \(X(2,1)\), \(Y(5,1)\), and \(Z(3,4)\). Rotate it \(90^\circ\) counterclockwise about the origin.
Step 1: Recall the rotation rule.
\((x, y) \rightarrow (-y, x)\)
Step 2: Apply the rule to each vertex.
\(X(2,1) \rightarrow X'(-1,2)\)
\(Y(5,1) \rightarrow Y'(-1,5)\)
\(Z(3,4) \rightarrow Z'(-4,3)\)
Step 3: Interpret the result.
The triangle turns around the origin without changing side lengths or angle measures.
The image is triangle \(X'Y'Z'\) with vertices \((-1,2)\), \((-1,5)\), and \((-4,3)\).
Because each point stays the same distance from the origin, this agrees with the turning pattern shown in [Figure 3].
Worked example 4: Specify a sequence of transformations
Triangle \(A(1,1)\), \(B(3,1)\), \(C(2,4)\) must be mapped onto triangle \(A''(-1,3)\), \(B''(-3,3)\), \(C''(-2,6)\). Find a sequence of transformations.
Step 1: Compare orientation.
The target triangle has reversed left-right placement compared with the original, suggesting a reflection across the \(y\)-axis.
Step 2: Reflect the original triangle across the \(y\)-axis.
\(A(1,1) \rightarrow A'(-1,1)\)
\(B(3,1) \rightarrow B'(-3,1)\)
\(C(2,4) \rightarrow C'(-2,4)\)
Step 3: Compare the reflected image to the target.
Each point must now move \(0\) units horizontally and \(2\) units up.
Step 4: Apply the translation.
Translate by \(\langle 0,2 \rangle\):
\(A'(-1,1) \rightarrow A''(-1,3)\)
\(B'(-3,1) \rightarrow B''(-3,3)\)
\(C'(-2,4) \rightarrow C''(-2,6)\)
A correct sequence is: reflect across the \(y\)-axis, then translate \(2\) units up.
The two-step match in [Figure 4] follows this same logic: identify whether the figure must flip first, then use a translation to place it exactly.
| Transformation | What it does | Orientation | Typical coordinate rule |
|---|---|---|---|
| Translation | Slides a figure | Preserved | \((x,y) \rightarrow (x+a, y+b)\) |
| Reflection | Flips across a line | Reversed | Example: across \(y\)-axis, \((x,y) \rightarrow (-x,y)\) |
| Rotation | Turns around a center | Preserved | Example: \(90^\circ\) counterclockwise, \((x,y) \rightarrow (-y,x)\) |
Table 1. Comparison of the three main rigid motions used to draw images and describe mappings.
This table is helpful when diagnosing an unknown transformation. If the figure flips, think reflection. If it turns around a fixed point, think rotation. If it simply shifts, think translation.
Transformations are used constantly in digital animation and video game design. A character may be translated across the screen, reflected to face the opposite direction, or rotated to match the camera angle. These actions must preserve shape accurately, or the graphics will look distorted.
Modern computer-aided design systems use transformation rules repeatedly to place parts, test symmetry, and simulate movement. A single complex object may be transformed thousands of times in one design process.
Architects use reflections to study symmetry in floor plans and building facades. Engineers use rotations and translations when aligning machine parts or modeling moving components. In robotics, a programmed arm must often rotate an object and then translate it into a precise position.
Map software and satellite imaging also depend on transformation ideas. Images may be rotated for orientation, reflected in data processing, or translated to align layers from different sources.
One common mistake is moving different vertices by different amounts during a translation. Every point must move by exactly the same vector. Another is forgetting that a reflection reverses orientation. If the target figure is not a mirror image, a reflection alone cannot be correct.
Students also sometimes confuse clockwise and counterclockwise rotations, or they rotate about the wrong center. Always identify the center first and check that all image points stay the same distance from it. Finally, remember that in sequences, order matters. Performing the right transformations in the wrong order may produce the wrong image.
"A geometric transformation is not random motion; it is motion with a rule."
That idea is what makes transformation geometry so powerful. You are not just redrawing a shape by eye; you are applying a rule that sends every point to a predictable image point.