A single \(2 \times 2\) matrix can resize a photograph, flip a video game map, rotate a robot's path, or slant a digital drawing. That may sound like computer science, but the underlying idea is pure mathematics: a matrix can act like a machine that moves every point in the plane according to one rule. Even more surprising, one number hidden inside the matrix—the determinant—tells you exactly how areas change.
In the coordinate plane, a point such as \((x,y)\) can also be viewed as a vector from the origin to that point. A matrix transformation uses a matrix to send each vector to a new vector. For a \(2 \times 2\) matrix, the transformation acts on the whole plane.
If \(A = \begin{pmatrix} a & b \\ c & d \end{pmatrix}\), then applying \(A\) to the vector \(\begin{pmatrix} x \\ y \end{pmatrix}\) gives
\[A\begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} ax + by \\ cx + dy \end{pmatrix}.\]
This means the point \((x,y)\) moves to the new point \((ax+by, cx+dy)\). Every point follows the same rule, so the matrix defines a geometric transformation of the entire plane.
When multiplying a matrix by a vector, each entry of the output comes from a row of the matrix dotted with the vector. Also, vectors in this lesson are written as column vectors, such as \(\begin{pmatrix} x \\ y \end{pmatrix}\).
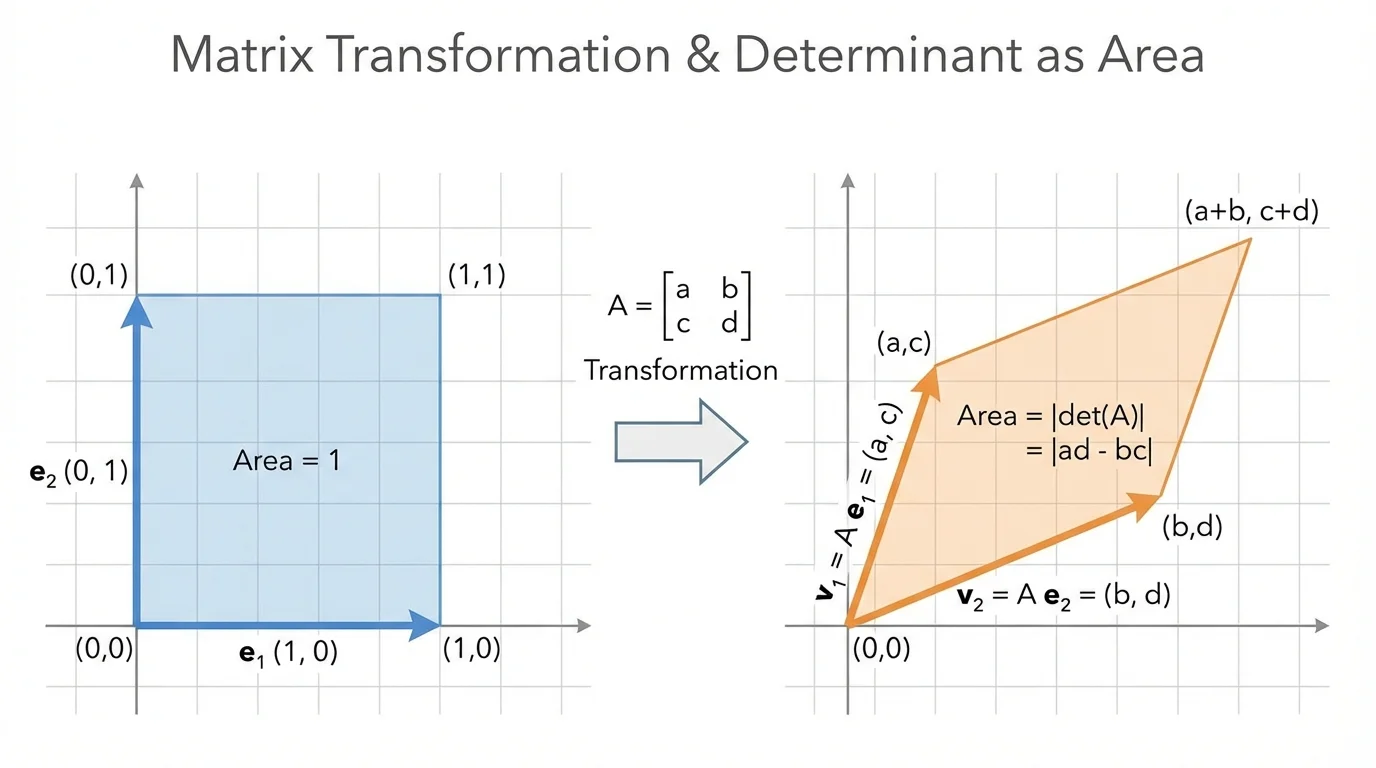
A powerful way to understand the transformation is to see what happens to the standard basis vectors \(\mathbf{e}_1 = \begin{pmatrix} 1 \\ 0 \end{pmatrix}\) and \(\mathbf{e}_2 = \begin{pmatrix} 0 \\ 1 \end{pmatrix}\). The matrix sends them to
\[A\mathbf{e}_1 = \begin{pmatrix} a \\ c \end{pmatrix}, \qquad A\mathbf{e}_2 = \begin{pmatrix} b \\ d \end{pmatrix}.\]
These are exactly the two columns of the matrix. So the columns of \(A\) tell us where the basic horizontal and vertical directions go. The unit square formed by \((0,0)\), \((1,0)\), \((0,1)\), and \((1,1)\) becomes a parallelogram, as shown in [Figure 1]. This simple picture becomes the key to understanding area and determinant.
If you know where the unit square goes, you already know a lot about the whole transformation. Lines stay lines, and shapes made from many tiny pieces all change in a consistent way.
Because matrix multiplication is linear, a transformation by a matrix preserves two important ideas: it keeps the origin fixed, and it treats combinations of vectors predictably. If \(\mathbf{u}\) and \(\mathbf{v}\) are vectors, then \(A(\mathbf{u}+\mathbf{v}) = A\mathbf{u} + A\mathbf{v}\), and if \(k\) is a number, then \(A(k\mathbf{u}) = kA\mathbf{u}\).
That is why matrix transformations are often called linear transformations. They do not bend lines into curves. Instead, they stretch, compress, rotate, reflect, or shear the plane in a structured way.
Linear transformation of the plane: a rule that sends vectors to vectors while preserving vector addition and scalar multiplication.
Determinant of \(\begin{pmatrix} a & b \\ c & d \end{pmatrix}\): the number \(ad - bc\).
For example, consider \(A = \begin{pmatrix} 2 & 0 \\ 0 & 3 \end{pmatrix}\). Then
\[A\begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} 2x \\ 3y \end{pmatrix}.\]
This doubles every \(x\)-coordinate and triples every \(y\)-coordinate. A square would turn into a rectangle.
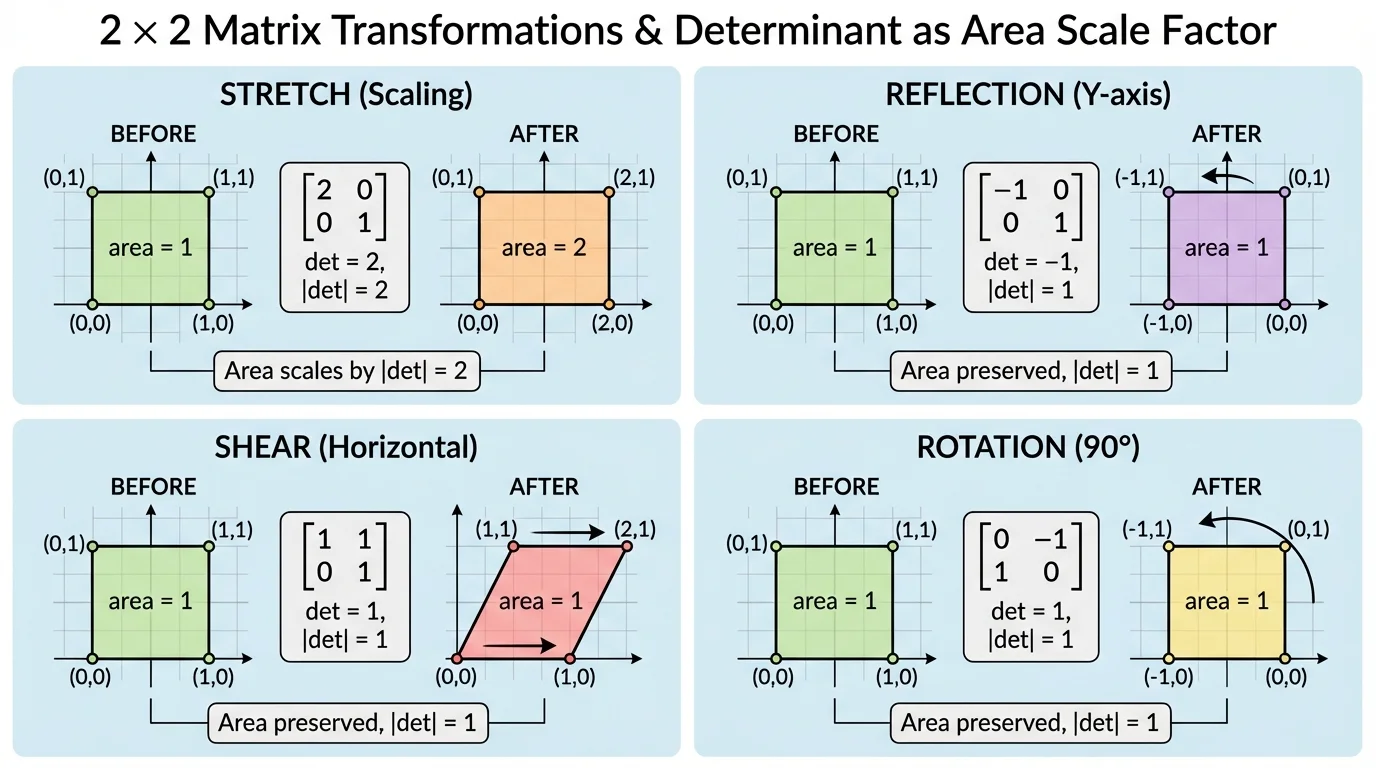
Different matrices create very different geometric effects, as [Figure 2] illustrates. Learning to recognize these patterns makes matrix transformations much easier to interpret.
Here are several important types.
Stretch or compression: A diagonal matrix such as \(\begin{pmatrix} 3 & 0 \\ 0 & 1 \end{pmatrix}\) stretches horizontally by a factor of \(3\). A matrix such as \(\begin{pmatrix} 1 & 0 \\ 0 & \dfrac{1}{2} \end{pmatrix}\) compresses vertically by a factor of \(\dfrac{1}{2}\).
Reflection: The matrix \(\begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix}\) reflects the plane across the \(x\)-axis. The matrix \(\begin{pmatrix} -1 & 0 \\ 0 & 1 \end{pmatrix}\) reflects across the \(y\)-axis.
Shear: The matrix \(\begin{pmatrix} 1 & k \\ 0 & 1 \end{pmatrix}\) produces a horizontal shear. It shifts points sideways depending on their height. Rectangles become parallelograms.
Rotation: A rotation by angle \(\theta\) about the origin is represented by
\[\begin{pmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{pmatrix}.\]
For instance, a rotation by \(90^\circ\) counterclockwise uses \(\begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix}\).
These examples show that matrices are not just tables of numbers. They are compact descriptions of geometric motion. Looking back at [Figure 1], notice that everything depends on where the two basis vectors move. Once those are known, the rest of the plane follows.
Computer graphics engines often use matrix transformations constantly behind the scenes. A game character turning, a camera zooming, or a 2D sprite being flipped can all be described using matrices.
The determinant of a \(2 \times 2\) matrix \(A = \begin{pmatrix} a & b \\ c & d \end{pmatrix}\) is
\[\det(A) = ad - bc.\]
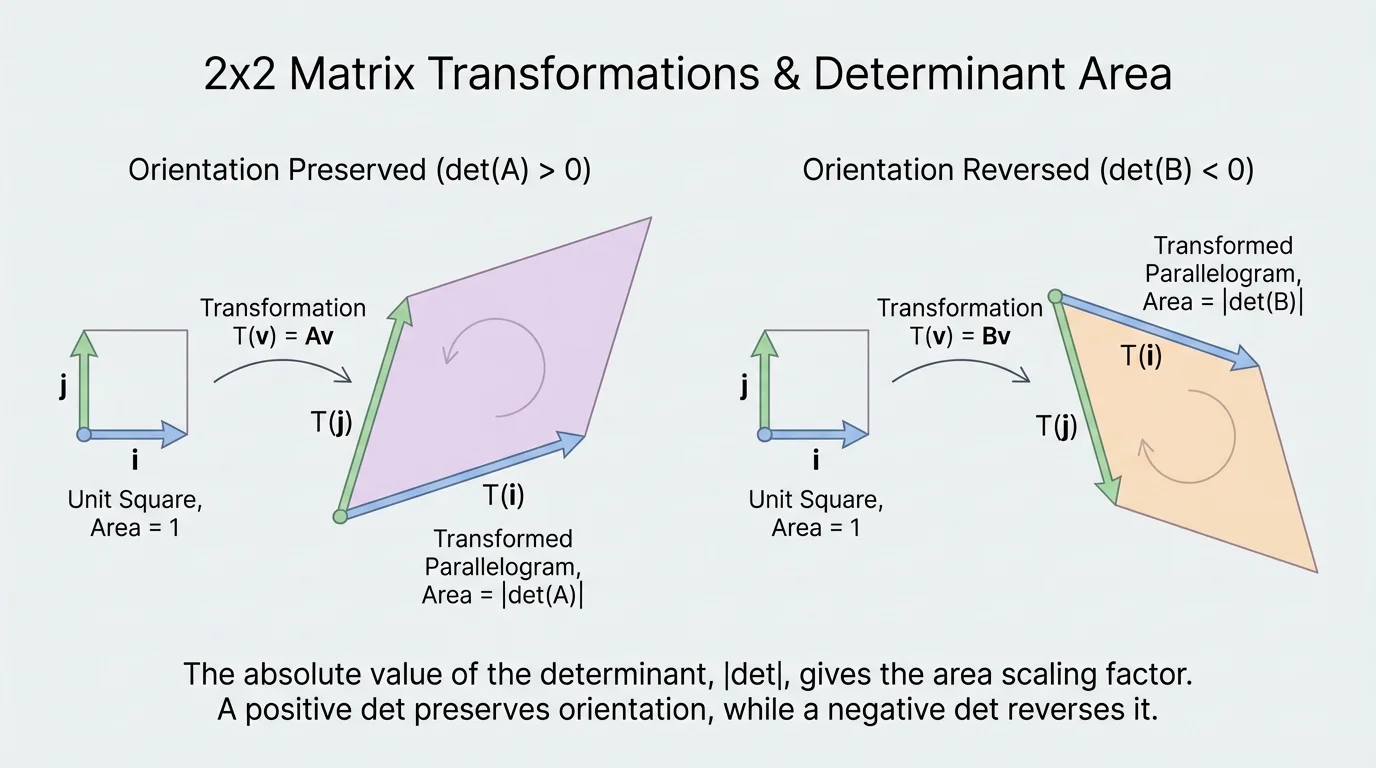
[Figure 3] At first this may look like just a formula to memorize. But it has a deep geometric meaning. The determinant describes how the transformation changes orientation and area.
If \(\det(A) > 0\), the transformation preserves orientation. If \(\det(A) < 0\), it reverses orientation, which happens in reflections and some combinations of transformations. If \(\det(A) = 0\), the transformation crushes the plane into a line or a point, so area becomes \(0\).
The sign of the determinant tells whether orientation is preserved or reversed. The area scale factor is the absolute value, \(|\det(A)|\). That is the factor by which every area in the plane is multiplied.
Why does \(|\det(A)|\) measure area change? Start with the unit square. Its area is \(1\). Under the transformation, the square becomes the parallelogram formed by the column vectors \(\begin{pmatrix} a \\ c \end{pmatrix}\) and \(\begin{pmatrix} b \\ d \end{pmatrix}\). The area of that parallelogram is \(|ad-bc|\), which is exactly \(|\det(A)|\).
So if the unit square gets area \(|\det(A)|\), then a region with area \(S\) gets transformed to a region with area
\[|\det(A)| \cdot S.\]
This is true for rectangles, triangles, polygons, and even curved regions, because they can be approximated by tiny pieces whose areas all scale the same way.
There is an important distinction here. The determinant itself can be negative, but area cannot. That is why we use \(|\det(A)|\) for actual area. The negative sign carries orientation information, not "negative area."
The unit square idea
The fastest way to interpret a \(2 \times 2\) matrix geometrically is to imagine what it does to the unit square. The transformed square becomes a parallelogram whose side vectors are the columns of the matrix. Its area is \(|\det(A)|\), and that one picture explains the area change for every other region in the plane.
This also explains a special case: if \(|\det(A)| = 1\), then area is preserved. Rotations and many reflections have this property. A shape may move or flip, but its area stays the same.
The best way to make these ideas concrete is to work through transformations step by step.
Worked example 1
Apply \(A = \begin{pmatrix} 2 & 1 \\ -1 & 3 \end{pmatrix}\) to the point \((4,2)\).
Step 1: Write the point as a column vector.
\((4,2)\) becomes \(\begin{pmatrix} 4 \\ 2 \end{pmatrix}\).
Step 2: Multiply the matrix by the vector.
\(A\begin{pmatrix} 4 \\ 2 \end{pmatrix} = \begin{pmatrix} 2 & 1 \\ -1 & 3 \end{pmatrix}\begin{pmatrix} 4 \\ 2 \end{pmatrix} = \begin{pmatrix} 2(4) + 1(2) \\ -1(4) + 3(2) \end{pmatrix} = \begin{pmatrix} 10 \\ 2 \end{pmatrix}\).
Step 3: Interpret the result as a point.
The image of \((4,2)\) is \((10,2)\).
The matrix sends the point \((4,2)\) to \((10,2)\).
Notice that the new point does not come from changing coordinates independently. The new \(x\)-coordinate depends on both old coordinates, and so does the new \(y\)-coordinate. That mixing is what gives many matrix transformations their geometric power.
Worked example 2
Find the determinant of \(B = \begin{pmatrix} 3 & 2 \\ 1 & 4 \end{pmatrix}\) and interpret it in terms of area.
Step 1: Use the determinant formula.
\(\det(B) = 3(4) - 2(1)\).
Step 2: Compute the value.
\(\det(B) = 12 - 2 = 10\).
Step 3: Interpret the sign and magnitude.
Since \(10 > 0\), orientation is preserved. Since \(|10| = 10\), every area becomes \(10\) times as large.
If a shape originally has area \(5\), then its image has area \(10 \cdot 5 = 50\).
That means a small region can become dramatically larger, even though the transformation still follows a simple algebraic rule.
Worked example 3
A triangle has area \(6\). It is transformed by \(C = \begin{pmatrix} 0 & 2 \\ 3 & 0 \end{pmatrix}\). Find the new area.
Step 1: Find the determinant.
\(\det(C) = 0(0) - 2(3) = -6\).
Step 2: Use the absolute value for area scale.
\(|\det(C)| = 6\).
Step 3: Multiply the original area by the scale factor.
\(6 \cdot 6 = 36\).
The new area is \(36\). The negative determinant means the transformation reverses orientation, but the area is still positive.
This example highlights one of the most common points of confusion: a negative determinant does not mean negative area. It means the plane has been flipped in orientation.
Worked example 4
Compare two transformations: first rotate by \(90^\circ\) counterclockwise, then stretch horizontally by a factor of \(2\); and reverse the order. Do they give the same result for the point \((1,1)\)?
Step 1: Write the matrices.
Rotation: \(R = \begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix}\). Horizontal stretch: \(S = \begin{pmatrix} 2 & 0 \\ 0 & 1 \end{pmatrix}\).
Step 2: Compute stretch after rotation.
\(R\begin{pmatrix} 1 \\ 1 \end{pmatrix} = \begin{pmatrix} -1 \\ 1 \end{pmatrix}\), then \(S\begin{pmatrix} -1 \\ 1 \end{pmatrix} = \begin{pmatrix} -2 \\ 1 \end{pmatrix}\).
Step 3: Compute rotation after stretch.
\(S\begin{pmatrix} 1 \\ 1 \end{pmatrix} = \begin{pmatrix} 2 \\ 1 \end{pmatrix}\), then \(R\begin{pmatrix} 2 \\ 1 \end{pmatrix} = \begin{pmatrix} -1 \\ 2 \end{pmatrix}\).
The results are different: \((-2,1)\) versus \((-1,2)\). So the order matters.
[Figure 4] When one matrix transformation is followed by another, the combined effect is represented by matrix multiplication. If you first apply \(A\) and then apply \(B\), the overall transformation is \(BA\). Order matters because matrix multiplication is generally not commutative.
That means \(AB\) and \(BA\) are often different, leading to different geometric results. A rotation followed by a stretch is usually not the same as a stretch followed by a rotation.
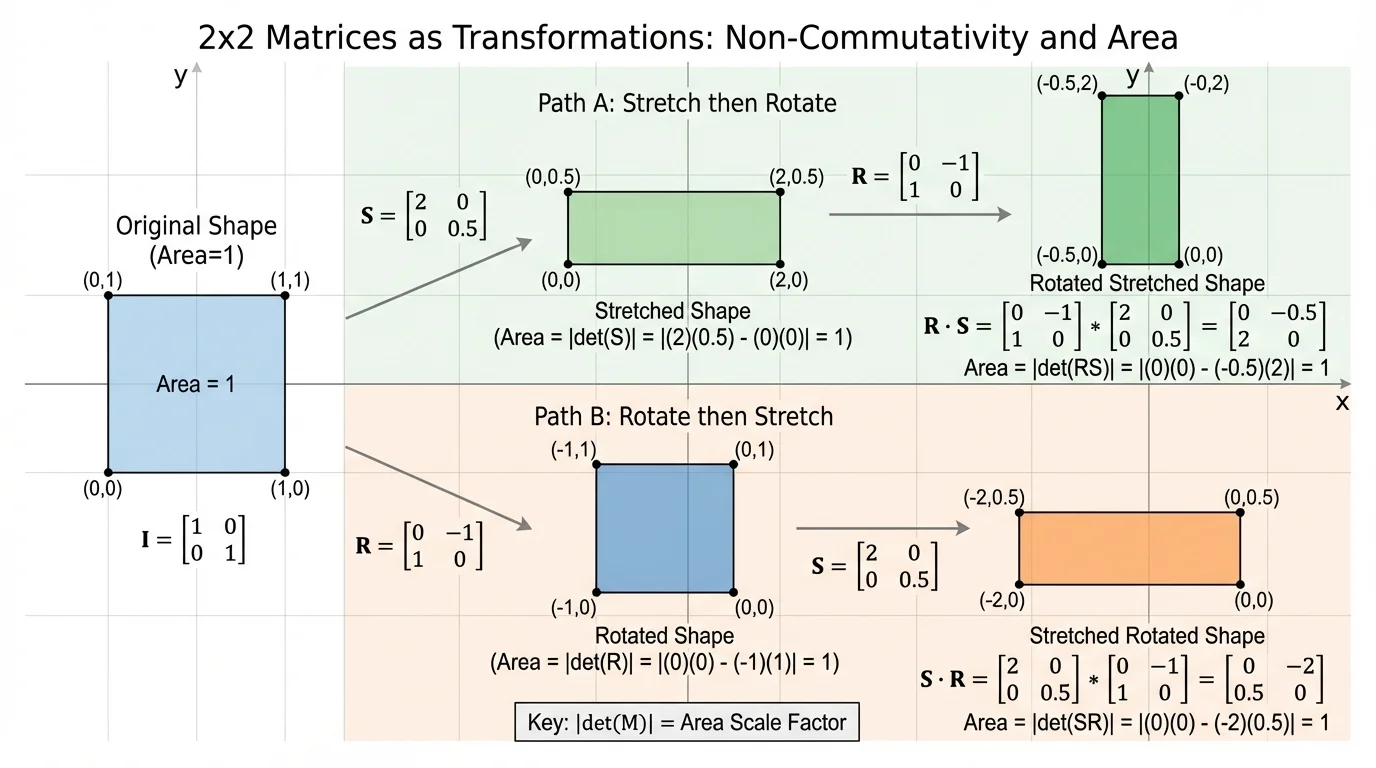
There is also an important determinant rule:
\[\det(AB) = \det(A)\det(B).\]
This makes perfect geometric sense. If one transformation multiplies area by \(|\det(A)|\) and another multiplies area by \(|\det(B)|\), then doing both multiplies area by \(|\det(A)\det(B)|\).
Thinking back to Figure 3, this also explains orientation changes. Two orientation reversals can cancel out, since a negative times a negative is positive.
Matrix transformations appear in many modern technologies.
Computer graphics: Images, animations, and game scenes are moved, rotated, scaled, and reflected using matrices. A character sprite may be stretched or rotated by multiplying point coordinates by a matrix.
Robotics: A robot arm or mobile robot often needs to track positions after rotations and directional changes. Matrices model those changes efficiently.
Image processing: Software that resizes or skews an image applies transformations to pixel positions. A shear matrix can create a slanted effect; a scaling matrix can enlarge or reduce an image.
Maps and engineering drawings: Plans are often scaled or transformed between coordinate systems. The determinant helps describe how much area changes during such transformations.
| Transformation type | Example matrix | Effect on area |
|---|---|---|
| Horizontal stretch by \(2\) | \(\begin{pmatrix} 2 & 0 \\ 0 & 1 \end{pmatrix}\) | Area multiplied by \(2\) |
| Reflection across \(x\)-axis | \(\begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix}\) | Area multiplied by \(1\) |
| Shear | \(\begin{pmatrix} 1 & 3 \\ 0 & 1 \end{pmatrix}\) | Area multiplied by \(1\) |
| Collapse to a line | \(\begin{pmatrix} 1 & 2 \\ 2 & 4 \end{pmatrix}\) | Area multiplied by \(0\) |
Table 1. Examples of \(2 \times 2\) matrices and their effects on area through the determinant.
One common mistake is mixing up rows and columns. The columns of the matrix show where the basis vectors go. If you switch that idea, your geometric interpretation will go wrong.
Another mistake is forgetting the absolute value when discussing area. The determinant may be negative, but area is always multiplied by \(|\det(A)|\), not by \(\det(A)\) itself.
A third mistake is assuming all transformations preserve area. Some do, such as rotations, reflections, and certain shears, but many do not. A diagonal matrix with entries greater than \(1\) can enlarge area quickly.
Finally, do not assume order does not matter. As shown earlier and reinforced by Figure 4, composing transformations in different orders often gives different images.
"The determinant is not just a number from a formula; it is a measurement of how space changes."
Once you start viewing a matrix as a transformation rather than a grid of numbers, many formulas become more meaningful. The matrix tells how directions move, and the determinant tells how area responds.