A pilot aims a plane due north, but the wind pushes it east. A swimmer heads straight across a river, but the current carries them downstream. In both situations, the actual motion is not just one direction or another. It is a combination of both. That is exactly what vectors help us describe: quantities that have both size and direction.
In everyday arithmetic, adding numbers means combining amounts. But in vector problems, direction matters too. If one vector points east and another points north, their sum points northeast. If one vector points east and another points west, they partly cancel. This makes vector addition more interesting than ordinary addition.
A vector written in magnitude and direction form tells you two things: how long the arrow is, and which way it points. When two such vectors are added, the result is called the resultant vector. The challenge is to determine both its magnitude and its direction.
You should already know how to use the Pythagorean theorem, basic trigonometric ratios, and inverse tangent. You should also be comfortable working on the coordinate plane, where positive and negative values matter.
For most algebra and physics problems, the direction angle is measured from the positive x-axis, moving counterclockwise. So a direction of \(0^\circ\) means right, \(90^\circ\) means up, \(180^\circ\) means left, and \(270^\circ\) means down.
A vector can be drawn as an arrow on the coordinate plane, as [Figure 1] shows. The arrow starts at one point, often the origin, and points in a certain direction. Its length represents the magnitude, and the angle it makes with the positive horizontal axis represents its direction.
A quantity such as distance, mass, or temperature is a scalar because it has size only. A vector, by contrast, includes direction. Velocity, force, and displacement are common examples of vectors.
Suppose a vector has magnitude \(a\) and direction \(\theta\). That tells us how long the vector is and where it points, but it does not yet tell us how much of the vector goes horizontally and how much goes vertically. To add vectors efficiently, we usually rewrite each vector in terms of its components.
Magnitude is the size or length of a vector.
Direction is the angle or orientation of the vector.
Components are the horizontal and vertical parts of a vector, usually written as an ordered pair.
If a vector has magnitude \(a\) and direction \(\theta\), then its horizontal and vertical components are found using trigonometry. This works because the vector and its components form a right triangle.
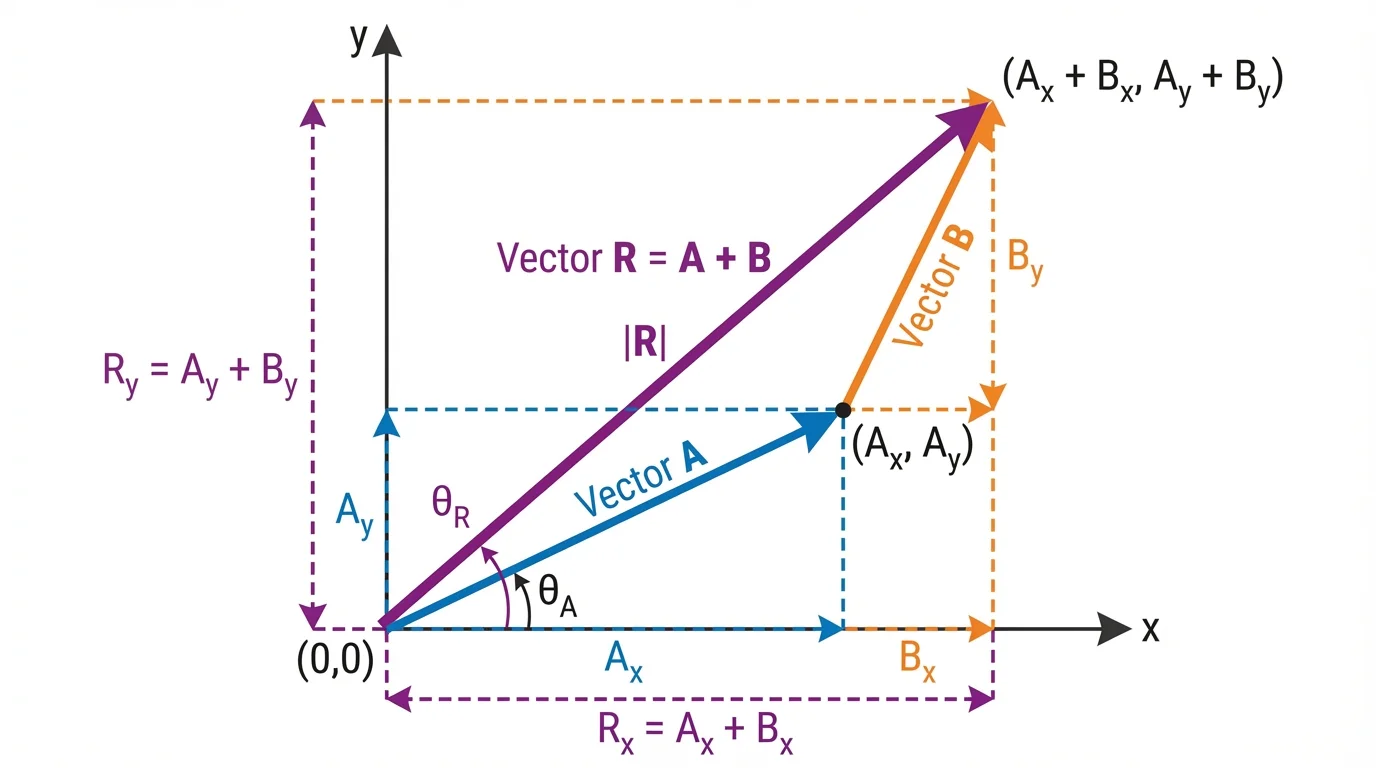
When a vector is broken into horizontal and vertical parts, the horizontal part is called the component in the x-direction, and the vertical part is the component in the y-direction. As [Figure 2] illustrates, the vector becomes the hypotenuse of a right triangle.
If the magnitude is \(a\) and the direction angle is \(\theta\), then the component form is
\[\langle a\cos\theta,\; a\sin\theta \rangle\]
That means
\[x = a\cos\theta \qquad y = a\sin\theta\]
These formulas come from right-triangle trigonometry: cosine gives adjacent over hypotenuse, and sine gives opposite over hypotenuse.
Signs matter. If the vector points left, then the x-component is negative. If it points downward, then the y-component is negative. This is why the angle and quadrant are so important.
Why components make addition easier
Adding vectors directly from lengths and angles is difficult because directions do not combine with simple arithmetic. Components solve this problem. Once each vector is rewritten as horizontal and vertical parts, you can add the horizontal parts together and the vertical parts together. After that, you convert back to magnitude and direction.
For example, a vector with magnitude \(a = 10\) and direction \(\theta = 30^\circ\) has components
\[\langle 10\cos 30^\circ,\; 10\sin 30^\circ \rangle = \langle 5\sqrt{3},\; 5 \rangle\]
In decimal form, this is approximately \(\langle 8.66, 5.00 \rangle\).
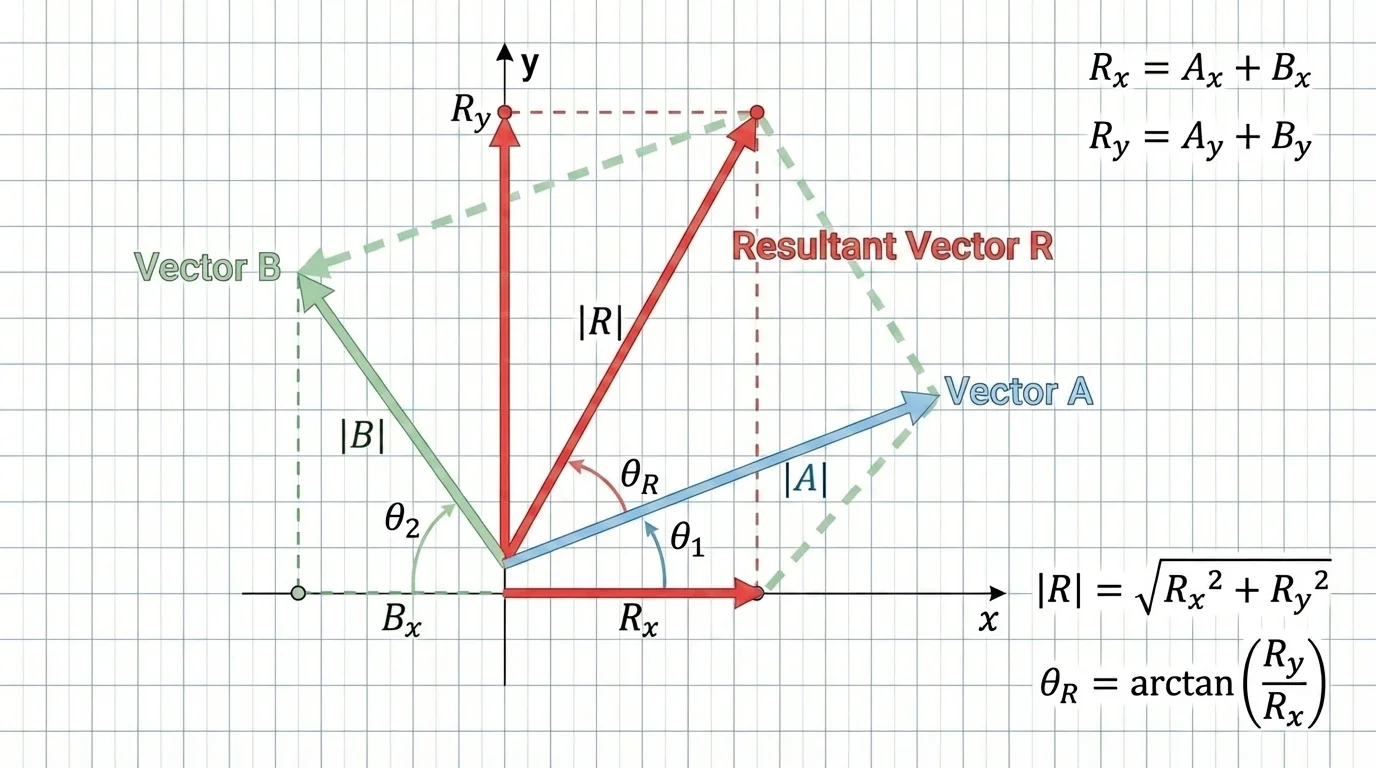
Once both vectors are in component form, vector addition becomes much more manageable. As [Figure 3] shows, the horizontal effects combine with each other and the vertical effects combine with each other.
If
\[\vec{u} = \langle x_1, y_1 \rangle \qquad \textrm{and} \qquad \vec{v} = \langle x_2, y_2 \rangle\]
then their sum is
\[\vec{u} + \vec{v} = \langle x_1 + x_2,\; y_1 + y_2 \rangle\]
This is called adding vectors component-wise. The result is another vector.
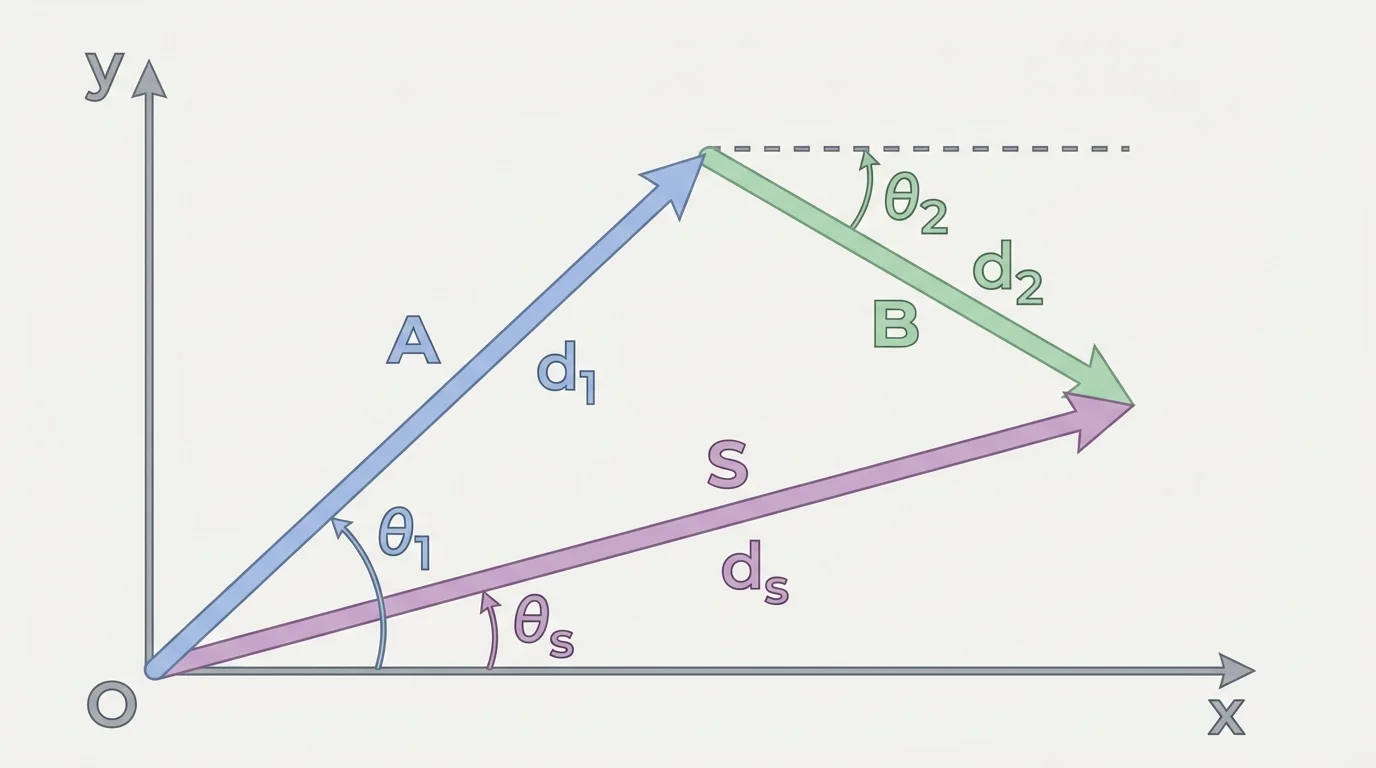
This method matches the geometric idea of vector addition. You may have seen the head-to-tail rule, where one vector starts where the other ends. The component method gives the same answer, but it is often more precise and easier for calculation.
If the sum has components \(\langle x, y \rangle\), then we still need to convert that back into magnitude and direction.
Suppose the sum of two vectors is \(\langle x, y \rangle\). The magnitude of the sum is the length of that vector:
\[|\vec{u} + \vec{v}| = \sqrt{x^2 + y^2}\]
This comes from the Pythagorean theorem.
To find the direction angle \(\theta\) of the sum, use tangent:
\[\tan \theta = \frac{y}{x}\]
So the basic angle can be found with inverse tangent:
\[\theta = \tan^{-1}\left(\frac{y}{x}\right)\]
However, inverse tangent alone does not always give the full direction correctly. You must check the quadrant using the signs of \(x\) and \(y\). For example, if \(x\) is negative and \(y\) is positive, the vector is in Quadrant II, so the direction angle must be between \(90^\circ\) and \(180^\circ\).
Navigation systems, video game physics engines, and robotics software constantly add vectors behind the scenes. Even when motion looks smooth and simple on a screen, it often comes from many component calculations happening every second.
A useful strategy is this: first find the reference angle with inverse tangent, then adjust based on the quadrant.
Let one vector have magnitude \(8\) and direction \(30^\circ\), and let the second vector have magnitude \(6\) and direction \(60^\circ\). Find the magnitude and direction of their sum.
Worked example 1
Step 1: Convert each vector to components.
For the first vector,
\[\vec{u} = \langle 8\cos 30^\circ,\; 8\sin 30^\circ \rangle = \langle 4\sqrt{3},\; 4 \rangle\]
For the second vector,
\[\vec{v} = \langle 6\cos 60^\circ,\; 6\sin 60^\circ \rangle = \langle 3,\; 3\sqrt{3} \rangle\]
Step 2: Add the components.
\[\vec{u} + \vec{v} = \langle 4\sqrt{3} + 3,\; 4 + 3\sqrt{3} \rangle\]
Using decimals,
\[\vec{u} + \vec{v} \approx \langle 9.93,\; 9.20 \rangle\]
Step 3: Find the magnitude.
\(|\vec{u} + \vec{v}| \approx \sqrt{9.93^2 + 9.20^2} \approx \sqrt{98.60 + 84.64} = \sqrt{183.24} \approx 13.54\)
Step 4: Find the direction.
\(\theta \approx \tan^{-1}(\dfrac{9.20}{9.93}) \approx 42.8^\circ\)
The sum has magnitude approximately 13.54 and direction approximately \(42.8^\circ\).
This result makes sense. Both original vectors point into the first quadrant, so the resultant should also point there. Notice that the direction \(42.8^\circ\) lies between \(30^\circ\) and \(60^\circ\), which is reasonable.
Now consider a case where signs become important. Let one vector have magnitude \(10\) and direction \(150^\circ\), and let the second vector have magnitude \(7\) and direction \(330^\circ\). Find the sum.
Worked example 2
Step 1: Convert each vector to components.
For the first vector,
\[\vec{u} = \langle 10\cos 150^\circ,\; 10\sin 150^\circ \rangle = \langle -5\sqrt{3},\; 5 \rangle\]
For the second vector,
\[\vec{v} = \langle 7\cos 330^\circ,\; 7\sin 330^\circ \rangle = \langle \frac{7\sqrt{3}}{2},\; -\frac{7}{2} \rangle\]
Step 2: Add the components.
\[\vec{u} + \vec{v} = \left\langle -5\sqrt{3} + \frac{7\sqrt{3}}{2},\; 5 - \frac{7}{2} \right\rangle = \left\langle -\frac{3\sqrt{3}}{2},\; \frac{3}{2} \right\rangle\]
In decimal form, this is approximately \(\langle -2.60, 1.50 \rangle\).
Step 3: Find the magnitude.
\(|\vec{u} + \vec{v}| \approx \sqrt{(-2.60)^2 + 1.50^2} = \sqrt{6.76 + 2.25} = \sqrt{9.01} \approx 3.00\)
Step 4: Find the direction.
First find the reference angle:
\(\tan^{-1}(\dfrac{1.50}{2.60}) \approx 30^\circ\)
But the vector has negative x and positive y, so it lies in Quadrant II. Therefore the direction is
\[180^\circ - 30^\circ = 150^\circ\]
The sum has magnitude approximately 3.00 and direction \(150^\circ\).
This example shows why quadrant checking matters. If you used inverse tangent without thinking about the signs, you might report \(30^\circ\), which points in the wrong direction.
An airplane has an airspeed of 200 km/h in a direction of \(90^\circ\), meaning due north. A wind blows at 50 km/h in a direction of \(0^\circ\), meaning due east. Find the plane's actual velocity relative to the ground.
Worked example 3
Step 1: Write each vector in components.
The plane's velocity is
\[\vec{p} = \langle 200\cos 90^\circ,\; 200\sin 90^\circ \rangle = \langle 0, 200 \rangle\]
The wind's velocity is
\[\vec{w} = \langle 50\cos 0^\circ,\; 50\sin 0^\circ \rangle = \langle 50, 0 \rangle\]
Step 2: Add the vectors.
\[\vec{p} + \vec{w} = \langle 50, 200 \rangle\]
Step 3: Find the magnitude.
\(|\vec{p} + \vec{w}| = \sqrt{50^2 + 200^2} = \sqrt{2{,}500 + 40{,}000} = \sqrt{42{,}500} \approx 206.2\)
Step 4: Find the direction.
\(\theta = \tan^{-1}(\dfrac{200}{50}) = \tan^{-1}(4) \approx 76.0^\circ\)
The plane's ground velocity has magnitude approximately 206.2 km/h and direction approximately \(76.0^\circ\) from the positive x-axis, or about \(14^\circ\) east of north.
This is the kind of calculation pilots and navigation systems use. The heading of the plane and the motion of the air are different vectors, and the actual path is their sum. The same idea appears in boating, drone flight, and even hiking in strong wind.
One common mistake is to add magnitudes directly. For instance, vectors of magnitudes \(5\) and \(7\) do not automatically add to \(12\). The answer depends on direction. If they point the same way, the magnitude of the sum is \(12\). If they point in opposite directions, it could be as small as \(2\). In many cases it is somewhere in between.
Another mistake is mixing up the angle convention. In some settings, especially navigation, directions may be given as bearings such as "\(30^\circ\) east of north." In that case, you must translate the wording into a standard angle before using sine and cosine, or carefully define your components another way.
The component picture from earlier, especially the right-triangle decomposition in [Figure 2], helps explain why cosine matches the horizontal part and sine matches the vertical part when angles are measured from the positive x-axis.
Rounding can also affect answers. It is often best to keep several decimal places during calculations and round only the final magnitude and direction.
Subtracting vectors is closely related to adding them. To compute \(\vec{u} - \vec{v}\), add the opposite of \(\vec{v}\). The opposite vector has the same magnitude but points \(180^\circ\) away. So subtraction can be treated as another vector-addition problem.
Quadrants and direction
If the resultant has components \(\langle x, y \rangle\), then the signs of \(x\) and \(y\) tell you the quadrant: Quadrant I has \(x\) positive and \(y\) positive, Quadrant II has \(x\) negative and \(y\) positive, Quadrant III has both negative, and Quadrant IV has \(x\) positive and \(y\) negative. Always use this sign check before giving the direction angle.
The combined-vector view in [Figure 3] also explains cancellation. If one vector contributes a positive horizontal component and the other contributes a negative one, those effects partially offset each other.
Vector addition appears throughout science, engineering, and technology. In physics, multiple forces acting on an object combine into a net force. In motion problems, a person's movement relative to the ground can depend on both their own velocity and the motion of the surface beneath them.
In sports, a soccer ball kicked while the player is already running has a resulting motion that combines two velocities. In engineering, cranes, bridges, and cables must account for forces acting at different angles. In computer animation and game design, realistic motion often depends on adding velocity and acceleration vectors frame by frame.
The basic idea stays the same: convert to components, add components, then convert back if needed. What changes is only the context.
Once you understand the process, problems that look complicated become structured and manageable. A vector in magnitude-direction form may seem hard to combine with another one, but components turn the problem into familiar algebra and trigonometry.